电气与电子测量技术
本文最后更新于:2025年6月11日 凌晨
电气与电子测量技术
教师:罗利文教授 朱荻彬教授
学分/学时:2/32
课程网址:www.icourse163.org/course/SJTU-1003452005
教材:
成绩构成:
- 线下期末考试:50%
- MOOC成绩:30%(作业20%,互动讨论20%,考试60%)
- 实验:20%
第一章 测量及测量系统
1 测量及测量方法
- 定义:人们借助测量仪器,以某种特定的方法将被测量和参考基准相比较,从而得到量化结果的实验过程。
- 三要素:测量对象、测量方法、测量仪器
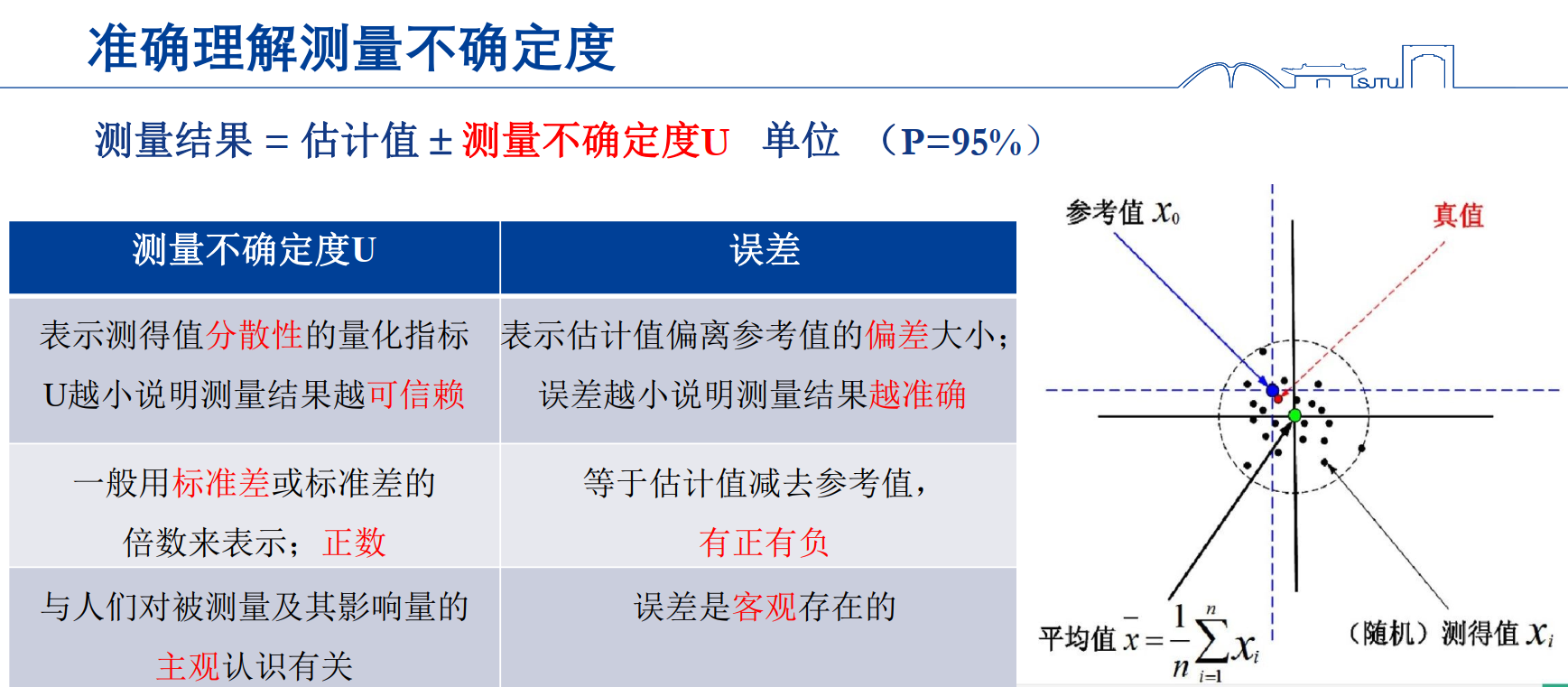
- 测量结果的正确表示:测量结果=估计值
不确定度 单位 ( P=95%) - 在多次重复测量中,估计值常常用平均值表示;
- 不确定度与置信概率P有关
- 测量结果中的单位建议使用国际单位制SI
- 国际单位制的7个基本单位
- 长度:米 m
- 时间:秒 S
- 质量:千克 kg
- 电流:安培 A
- 温度:开尔文 K
- 物质的量:摩尔 mol
- 发光强度:坎德拉 cd
- 测量仪器的基本功能:
- 给出测量示值
- 提供参考基准与被测量相比较
- 模拟仪表:用标准量标定过的刻度
- 数字仪表:最常见的参考基准
- 测量电压电流:参考电压
- 测量电阻:标准电阻
- 测量电容:标准电容
参考基准的准确程度直接决定测量结果准确度的上限!
- 测量仪器的基本要求
- 准确:误差小
- 精密:不确定度小(分散性小)
- 可靠:可等精度重复
- 灵敏: 例如LIGO需要检测出4km激光臂发生了10-18m量级的应变(质量直径的千分之一)
- 测量方法的选取原则:科学,合理,方便
- 测量方法的分类:没有统一的分类标准
- 按测量结果的获得方式:直接测量、间接测量
- 按被测量所处状态:稳态测量、暂态测量
- 按设备在线与否:在线测量、离线测量
2 现代电气测量系统的基本组成
现代数字化测量系统的基本组成:传感器-信号调理-数模转换-计算机-显示结果
系统性能与每个环节有关
- 系统总的传递函数:
- 系统可以包括所有环节,也可以只是其中一个环节
- 测量系统的特性参数:(JJF 1001-2011《通用计量术语与定义》中共列出32项)线性度、灵敏度、分辨力、准确度等级、测量不确定度、零点、响应时间、量程、测量范围、动态范围、最大允许误差、引用误差
3 测量系统的静态特性
静态特性又称“刻度特性”、 “标定曲线”。
- 理想测量系统—线性特性
S0—零位; S1—灵敏度 - 实际的测量系统—非线性特性
式中 , , ,…, 为常量
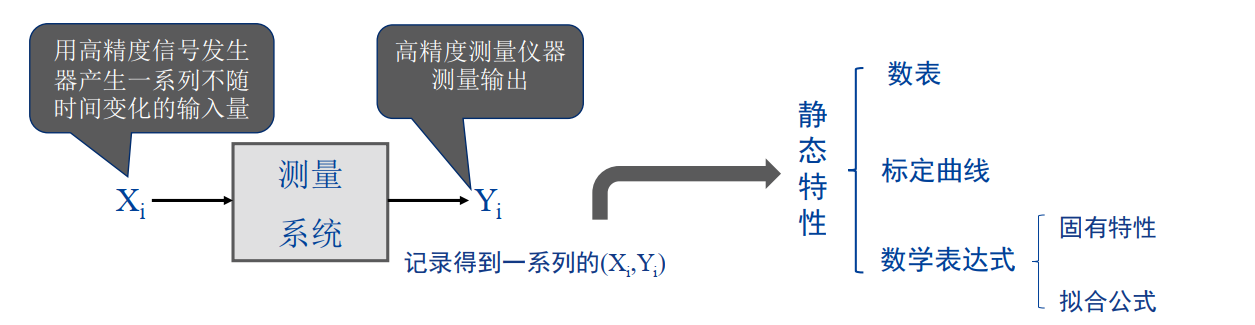
静态特性是在规定的标准工作条件下获得的。
工作条件:指包括温度、湿度、大气压力、电源电压等所有可能影响测量结果的因数
静态特性的基本特征参数
- 灵敏度
给系统的输入施加一个微小增量△x,引起系统输出发生了微量变化△y,则灵敏度为:
当然可以。图中包含两个公式:
- 线性度
系统的输入输出之间保持线性关系一种度量。线性度定量反映标定曲线偏离其拟合直线的程度
线性度 = 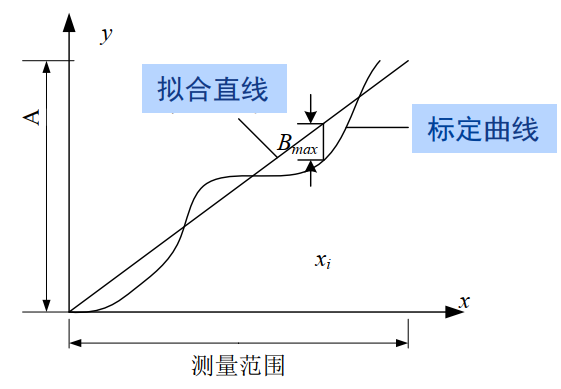
- 零位
输入为零时测量系统观测到的测量值。
- 零位值可以非零。
- 理想的零位应该是一个常数
- 实际测量系统中由于放大器、ADC存在输入失调,会导致零位偏移
- 零位温漂:由于半导体特性与温度有关,零位的偏移量还会随温度变化而漂移
- 分辨力(Resolution)与分辨率
分辨力是指测量系统能够分辨的最小输入变化的绝对量
- 分辨率则是分辨力相对于满量程的百分比
- 分辨率不是测量精度或准确度等级
- 在数字化测量系统中的分辨力就是一个字(1个LSB),刻度标尺的分辨力常取半个最小刻度
分辨力 =
分辨率 =
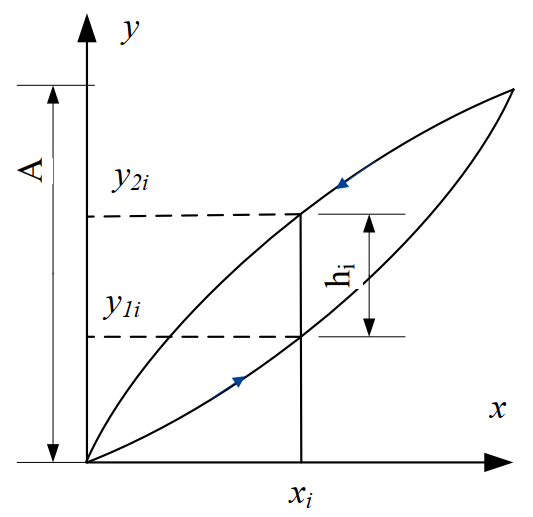
- 回程误差
表征测量系统在全量程范围内,输入递增变化(由小变大)中的标定曲线和递减变化(由大变小)中的标定曲线二者静态特征不一致的程度。
回程误差 =
- 量程
测量系统标称范围的上下限之差的模
例如:温度计的下限 -30°,上限50°,则其量程为:|50 -(-30)|=80°
- 动态范围
是指测量系统所能测量的最强输入与最弱输入之比,常常用分贝数来表示。
例如:某频谱分析仪最弱输入信号1mV,最强输入信号10V,则其动态范围就是:20lg10/0.001=80dB
4 测量系统的动态特性
- 动态特性定义:输入信号x(t)是随时间变化的情况下,测量系统的输入—输出之间的特性;动态特性反映测量系统测量动态信号的能力;
- 动态特性的描述
- 时域:微分方程
- 复频域:传递函数
- 频域:频率特性
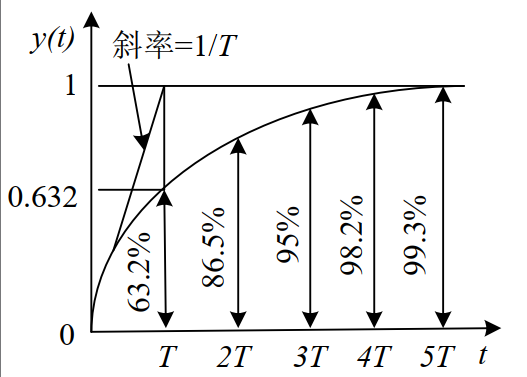
一阶测量系统的动态特性
一阶测量系统动态特性的时域特征参数:时间常数
一阶系统的阶跃响应:非周期型、按指数规律上升并趋于饱和。
一阶系统的频率特性
微分方程
传递函数
频率特性
为时间常数, 为直流放大倍数。 幅频特性
相频特性
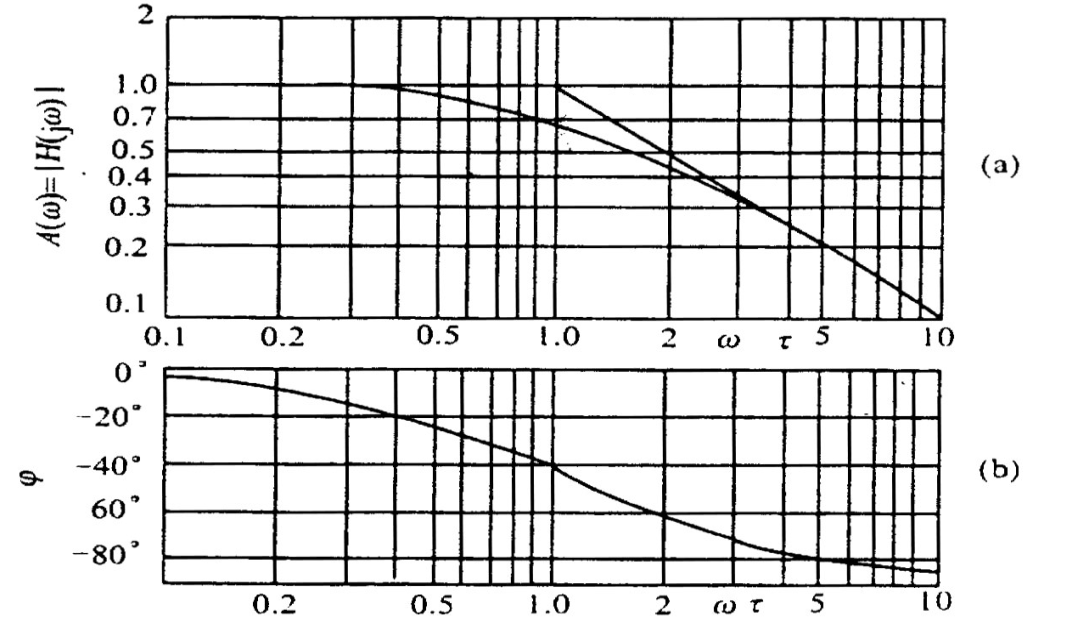
- 一阶测量系统动态特性的频域特征参数
- 转折频率
- 转折频率
例题
例题: 用一时间常数为2s的温度计测量炉温时,当炉温在200°C—400°C之间,以150s为周期,按正弦规律变化时,温度计测得的温度范围是多少?
(1) 已知:被测输入量为,
测量系统为一阶系统,时间常数,其幅值与频率的关系:
(2) 输出温度的波动幅度为:
(2) 输入为200°C、400°C时,其输出分别为:
二阶测量系统
数学模型:
- 微分方程
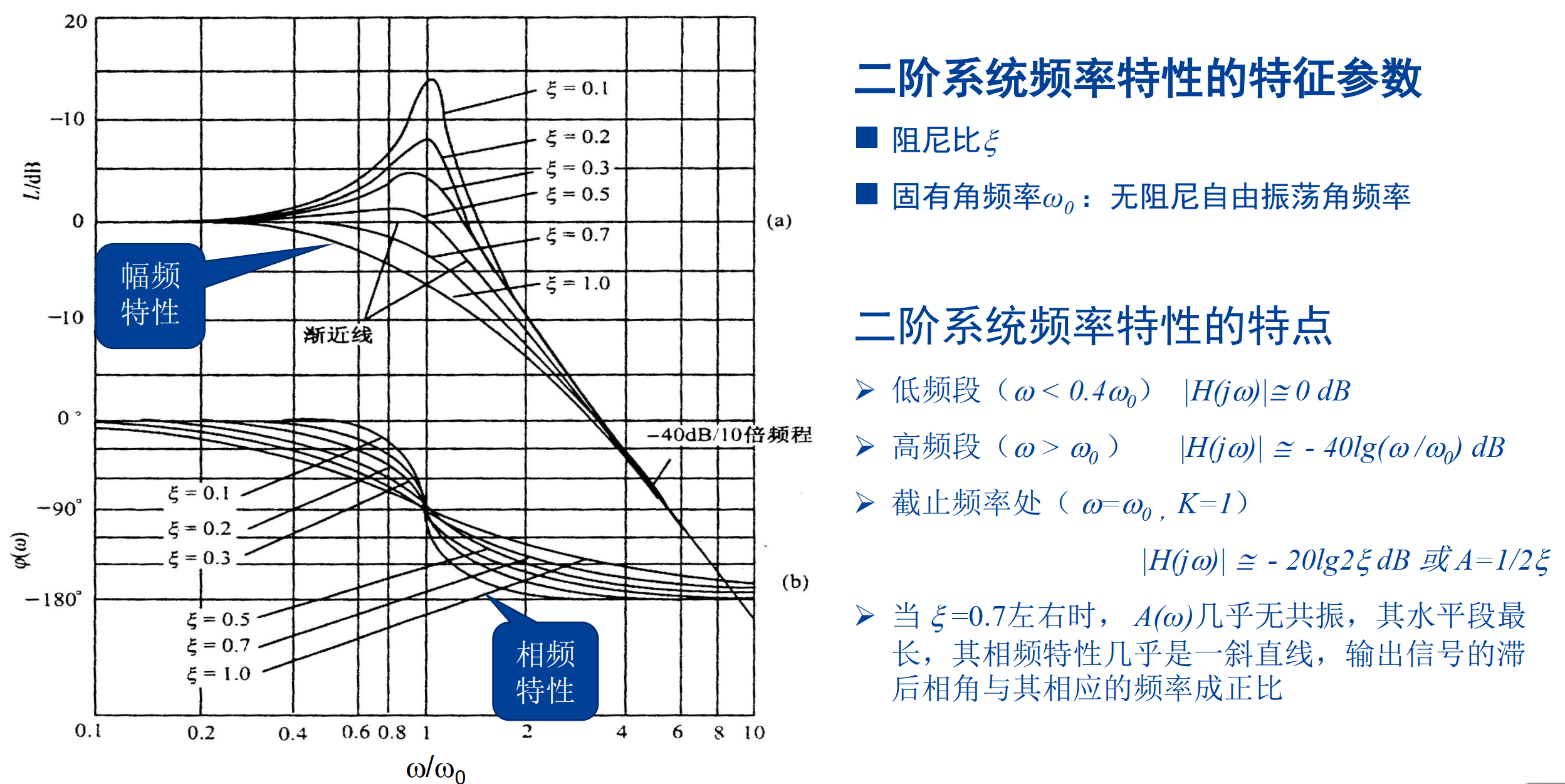
频率特性
幅频特性
对数幅频特性
相频特性
阶跃响应:
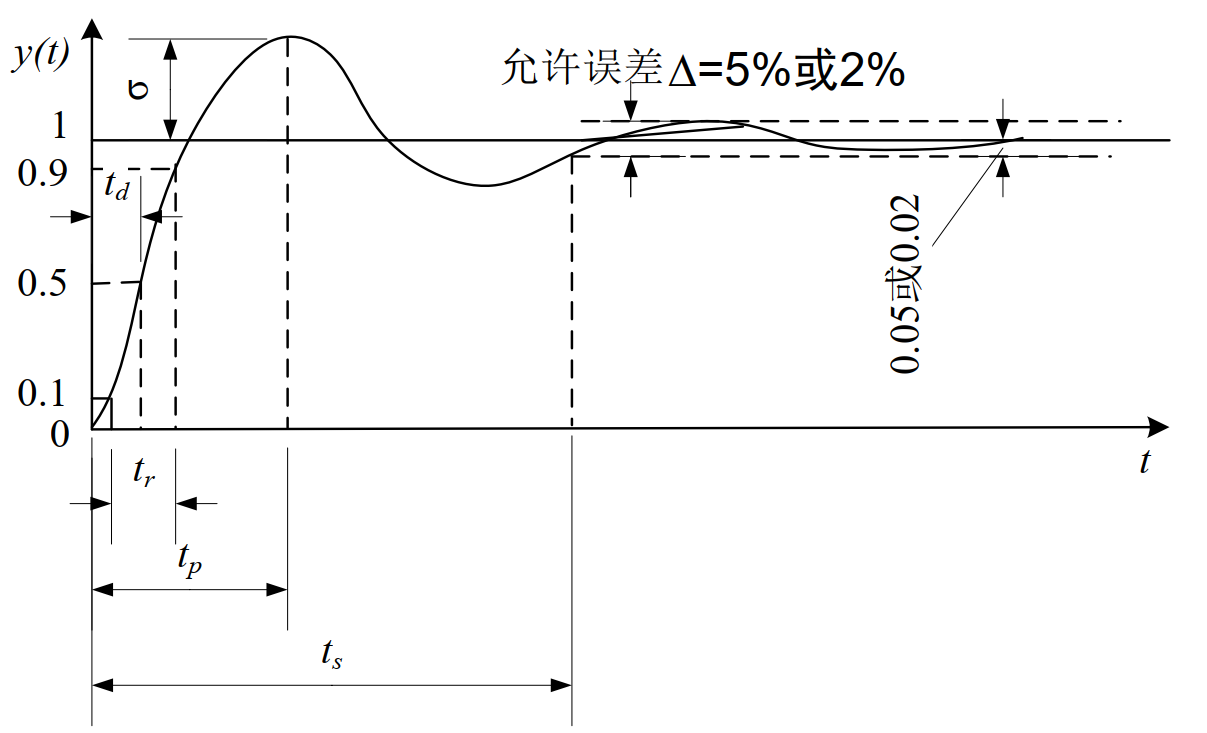
时:为衰减震荡曲线,阻尼振荡频率 - 上升时间
- 峰值时间
- 响应时间
- 超调量
- 上升时间
时:近似为一阶测量系统
超调量
5 电气测量系统的主要技术指标
不做要求
第二章 误差与测量不确定度
1 测量误差的基本概念
基本术语:
- 标称值:计量和测量器具上标注的量值(通常给出准确度等级或误差范围)。
- 示值:测量仪器上给出的量值,也称测量值。
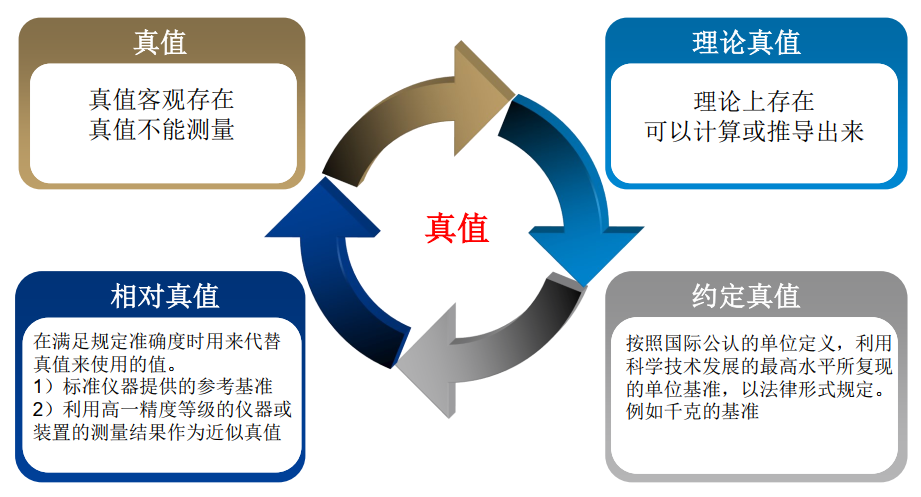
- 准确度、准确度等级和不确定度——准确度:测量结果与真值一致的程度。由于涉及到“不可知”的真值,只是定性的概念。定量描述:准确度等级、不确定度。
- 等精度重复测量:在相同条件下(测量三要素、环境等),对同一被测量进行多次连续测量。
2 表达误差的几种形式
误差的分类:
| 误差 | 误差 |
|---|---|
| 按性质分类 | 系统误差(已定和未定),随机误差,粗大误差 |
| 描述测量的误差 | 绝对误差,相对误差 |
| 描述仪表的误差 | (最大)引用误差,允许(容许)误差;线性度,回程误差,迟滞误差,基本误差 |
绝对误差(Absolute Error)
- 定义:测量值与被测量的真值之间的差值
绝对误差 = 测量值 - 被测量的真值(常用约定真值或相对真值代替)
- 修正值:绝对误差的负值,一般用
表示, - 仪器的修正值需由授权的计量部门检定给出。
- 理论上,示值加上修正值可获得真值,但实际修正的只是一部分误差(已定系统误差)。
相对误差(Relative Error)
- 定义:绝对误差与被测量真值的比值。
两者分别表示的是:真值相对误差 = 绝对误差与约定真值或相对真值的比值 或 示值相对误差 = 绝对误差与测量值的比值
- 在实际测量中,相对误差主要用来评价某次测量结果的准确度,相对误差越小准确度愈高。
例题:相对误差与绝对误差
弹道导弹射程10000km,射击点偏离目标100m,狙击手50m远射击,偏离靶心2cm,问哪一次射击更准?
解:相对误差小则更准。
弹道导弹:
狙击手:
弹道导弹射击精度十万分之一,比狙击手的万分之四要准。
最大允许误差(极限)及其表达形式
定义:测量仪器制造厂按有关技术规范预先设计规定了允许误差的极限值, 当最终检验时凡不超出
此范围的仪器均为合格品可以出厂, 并以绝对误差
通用计量学基本术语》中该绝对误差
模拟仪表:
数字仪表:
例题:允许误差及其表示方法
例:某四位半数字电压表,量程为2V,允许误差为个字,用该表测量时,读数分别为0.0012V和1.9888V,试求两种情况下的绝对误差和相对误差的极限值。
解:四位半DVM表的分辨力为
最大引用误差
在规定的工作条件下,在仪表量程范围内出现的最大绝对误差与仪表量程之比用百分数表示。
$$r_{nm} = \frac{|\Delta A|m}{A_m} \times 100%$$
$r{nm}
仪表的准确度等级
我国电工测量仪表的准确度等级(Accuracy Class)就是参考最大引用误差进行分级的。通常用最大引用误差去掉正负号和百分号后的数字部分来表示准确度等级,用符号G表示。
国家标准GB 776—76《电测量指示仪表通用技术条件》 规定,测量指示仪表的精度等级G分为: 0.1、 0.2、 0.5、 1.0、 1.5、 2.5、 5.0 七个等级。对应的最大引用误差分别为: 0.1%、 0.2%、 0.5%、 1.0%、 1.5%、 2.5%、 5.0%
检测仪器的准确度等级由生产厂商根据其最大引用误差的大小并以“选大不选小”的原则就近套用上述等级得到。
例题:仪表的准确度等级
【例】一个电压表,其满量程为100V,若其最大误差出现在50V处且为0.12V,则最大引用误差:
解:
则可以确定仪表等级为0.2级。
例题:【例】某1.0级电压表,满度值(标称范围上限)为300,求测量值分别为300,200和100时的最大绝对误差和最大相对误差。
【解】根据题意得 α = 1.0,
最大绝对误差为
对应的最大相对误差分别为:
结论:
- 测量误差不但与仪表准确度等级有关,而且还与仪表的量程有关。
- 为了减小测量误差,被测量应与仪表的量程相适应,被测量一般应在满量程的2/3以上。
3 误差的性质和分类
测量误差的分类:
- 系统误差
- 已定系统误差:可修正
- 未定系统误差:不确定度
- 随机误差
- 用标准差代表A类不确定度
- 粗大误差
- 莱依达(
)准则 - Grubbs准则
- 莱依达(
系统误差
定义:对同一被测量进行等精度重复测量n(n→∞)次,所得结果的平均值与被测量的真值之差
特征
- 系统误差表明了一个测量结果偏离真值或实际值的程度。系差越小,测量就越准确。
- 大小、方向恒定不变或按一定规律变化
- 可再现,可以预测
随机误差
定义:测量值与在重复性条件下对同一被测量进行无限多次测量结果的平均值之差。
特征
- 单次测量的随差没有规律,随机误差的大小、方向均随机不定,不可预见,不可修正;
- 多次测量,测量值和随机误差的总体服从统计规律;
- 可用概率统计学中标准差、置信度来对随机误差的总体大小及分布做出估计。
随机误差和系统误差特性:
- 系统误差越小, 则测量值与实际值符合的程度越高。
- 随机因素使测量值呈现分散而不确定, 但总是分布在某一常数(平均值) 附近。
- 测量准确度高意味着系统误差和随机误差都小。
粗大误差
定义:明显超出统计规律,预期值的误差
来源:测量方法不当或错误、测量操作疏忽和失误、测量条件的突然变化
剔除:该误差明显歪曲了测量结果, 应按照一定的准则剔除含有粗大误差的测量数据
4 有效数字
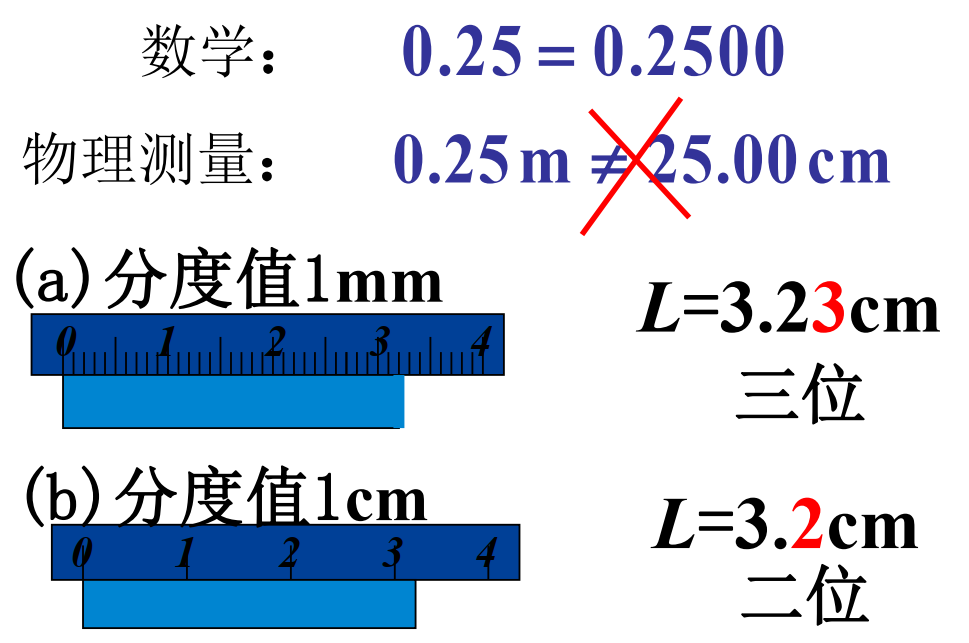
计量学中的有效数字的定义:除最末一位数字是不确切或估计值外,其它数字均为确切值,则该数的所有数字称为有效数字(不应包含不确切的数字部分)。
数学中有效数字的定义:从左边第一个非零数字往右所有由数字都是有效数字。
测量结果保留有效位数的原则:最末一位数字是不可靠的,而倒数第二位数字是可靠的。
偶数法则的四舍五入
- 大于5则进位,小于5舍去
- 若舍去部分的数值等于5,当末位为偶数时则末位不变,当末位是奇数时则末位加1。
【例】保留2位小数。
下面两例中,舍去部分都为5,但被保留部分的末位分别是奇数和偶数
例1:1.235V→1.24V 保留部分的末位为奇数
例2:1.245V→1.24V 保留部分的末位为偶数
数据记录、运算的准确性要和测量的准确性相适应!误差一般只取一位有效数字(特殊情况下最多取两位有效数字),测量结果的末位数应与误差的末位数对齐。
有效数字:所有准确数字和一位欠准确(估计)数字。
5 系统误差的校正
系统误差的削弱或消除的方法
- 最根本的方法: 消除系统误差产生的原因
- 引入修正值进行校正
- 实际值=测量值+修正值
- 修正值的获取方法
- 仪表的检定证书给出
- 通过理论推导求取
- 通过试验求取
- 注意1:修正值本身也包含有一定的误差,总要残留少量的系统误差。
- 注意2:未能修正的系统误差相对随机误差而言已不明显了, 实际处理时常统归到随机误差来处理。
- 其它方法:略
6 随机误差的统计学处理
随机误差统计特性:
通过大量试验统计结果证明,大样本测量列的随机误差具有如下特性:
- 有界性:随机误差的绝对值在一定范围内
- 居中性:绝对值小的随机误差比绝对值大的随机误差出现
的可能性大 - 对称性:绝对值相等的正、负随机误差出现的机会相等
- 抵偿性:
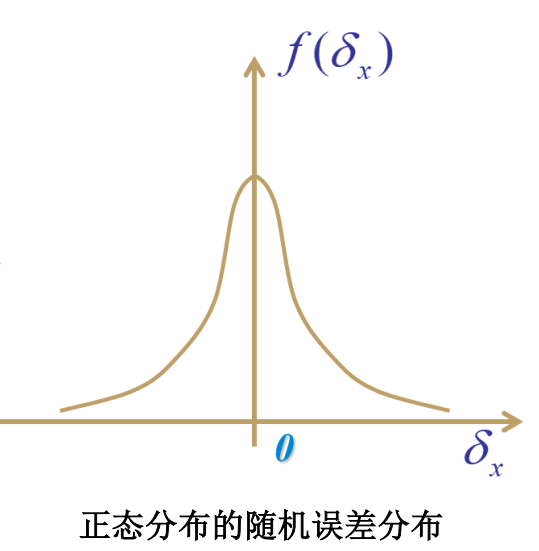
随机误差的正态分布
实践和理论证明,大样本测量列的随机误差服从正态分布规律:
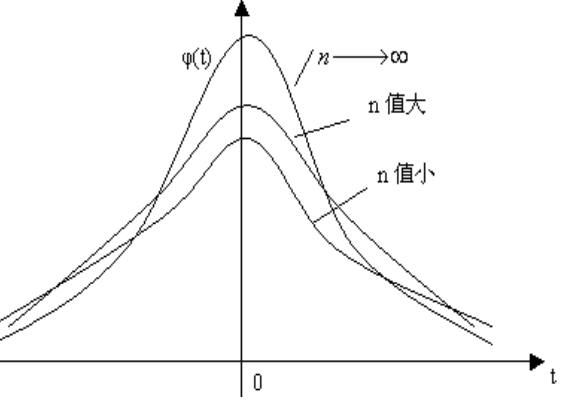
t 分布(学生分布):
- 特点:主要用来处理小样本(样本数n<30)的测量列
- 和标准正态分布的图形类似
- t分布与标准差的估计值无关,但与自由度
有关 - 当n较大(n>30)时,t分布和正态分布的差异就很小了,
- 当n→∞时,两者就完全相同了
均匀分布:
定义:在某一区域内,随机误差出现的概率处处相等,而在该区域外随机误差出现的概率为零。
常见符合均匀分布的误差:
- 仪器度盘刻度差引起的误差;
- 仪器最小分辨率限制引起的误差
- 数字仪表的量化(± 1LSB)误差
- 数字计算中的舍入误差
- 对于一些只知道误差出现的大致范围,而不知其分布规律的误差,在处理时经常按均匀分布的误差对待
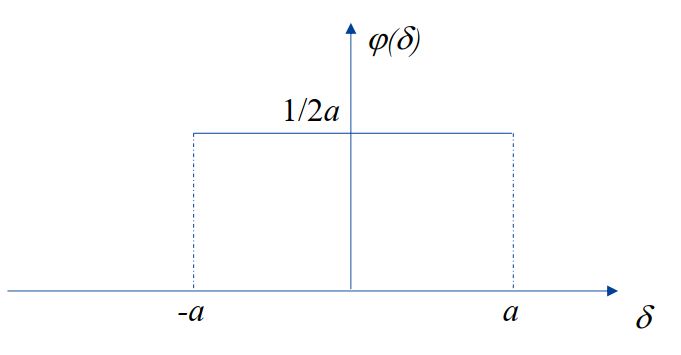
a为随机误差 δ 的极限值
随机变量的数学期望 (n→∞)
随机变量的数学期望M(x):反应随机变量
的分布中心(平均特性) 随机变量{
}的数学期望是真值 的最佳估计
由随机误差的抵偿特性有:
测量数据的数学期望为无数次测量的平均值
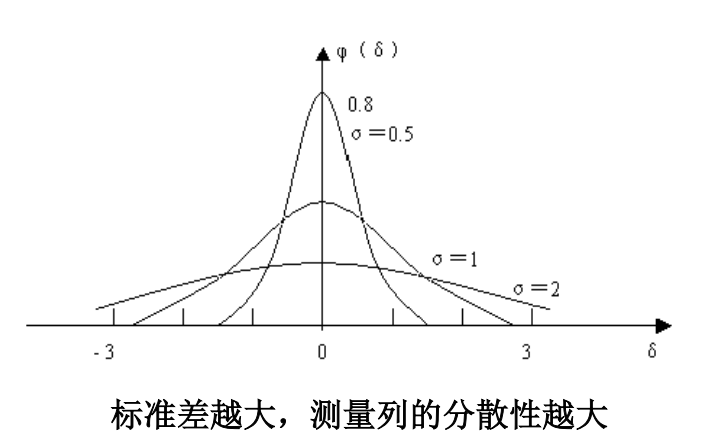
随机变量的标准差 (n→∞)
- 标准差:描述随机变量与其数学期望的分散程度
- 标准差定义式为:
有限测量列的数学期望及标准差的估计
- 算术平均值原理——有限测量列的算术平均值是数学期望的最佳估计值
- 剩余误差——
(用平均值代替真值计算随机误差) - 贝塞尔公式计算标准偏差的估计值——实验标准差
算术平均值的实验标准差
- 在有限次的测量列中,以算术平均值作为测量结果的估计值,故算术平均值本身也是随机变量,它也有标准差
- 算术平均值的实验标准差
例题:【例】用温度计重复测量某个不变的温度,得11个测量值的序列(见下表)。求测量值的平均值及其实验标准差。
序号 1 2 3 4 5 6 7 8 9 10 11 (°C) 528 531 529 527 531 533 529 530 532 530 531 -2.1 +0.9 -1.1 -3.1 +0.9 +2.9 -1.1 -0.1 +1.9 -0.1 +0.9 测量列的实验标准差: 平均值实验标准差:
测量结果的置信度
置信度:表征多次测量数据的可信赖程度,需要指定置信区间或置信概率
给定置信区间下,置信概率P等于概率密度函数 (x)在该区间的积分
正态分布的置信概率:
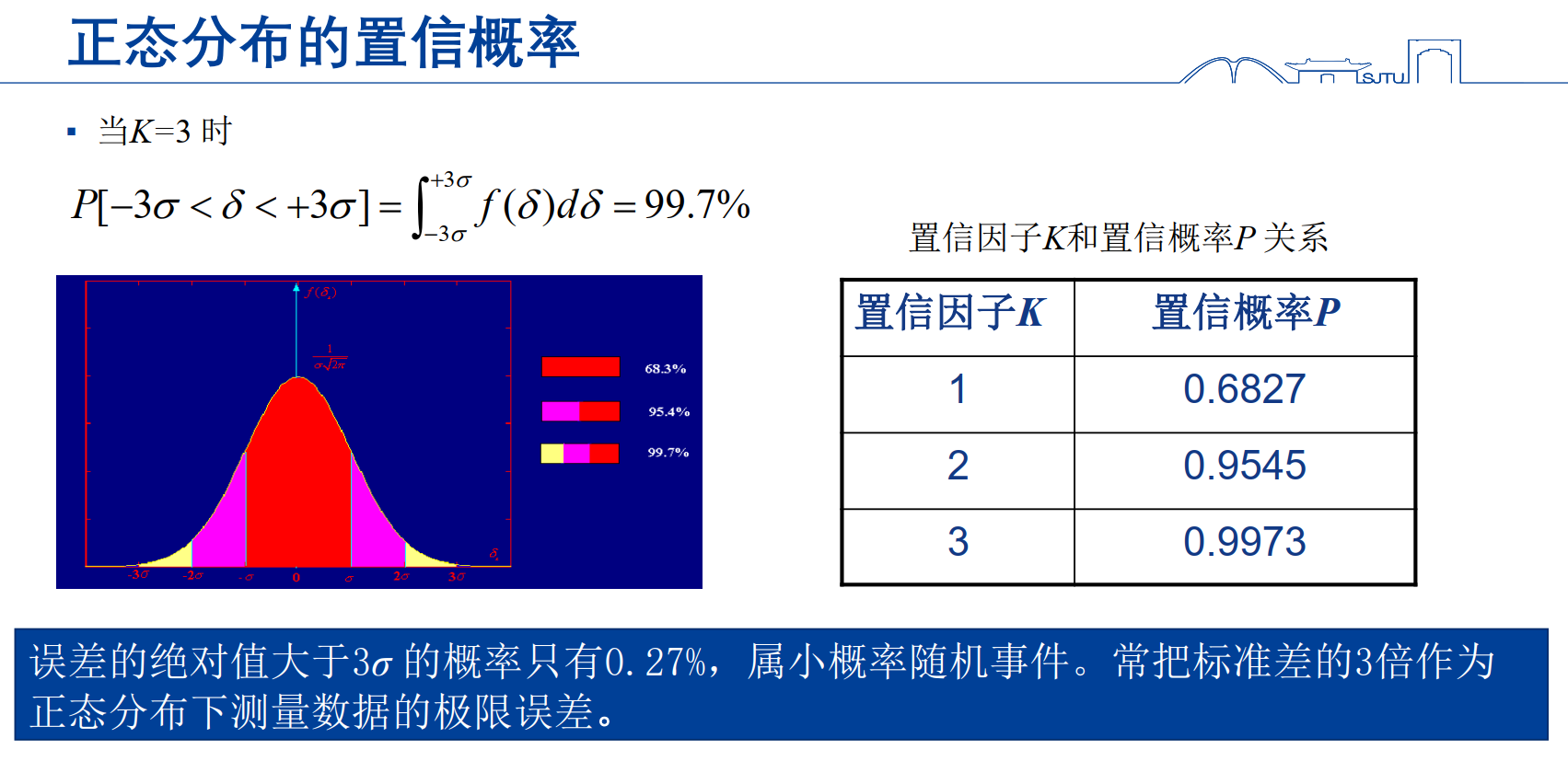
误差的绝对值大于3σ 的概率只有0.27%,属小概率随机事件。常把标准差的3倍作为正态分布下测量数据的极限误差。
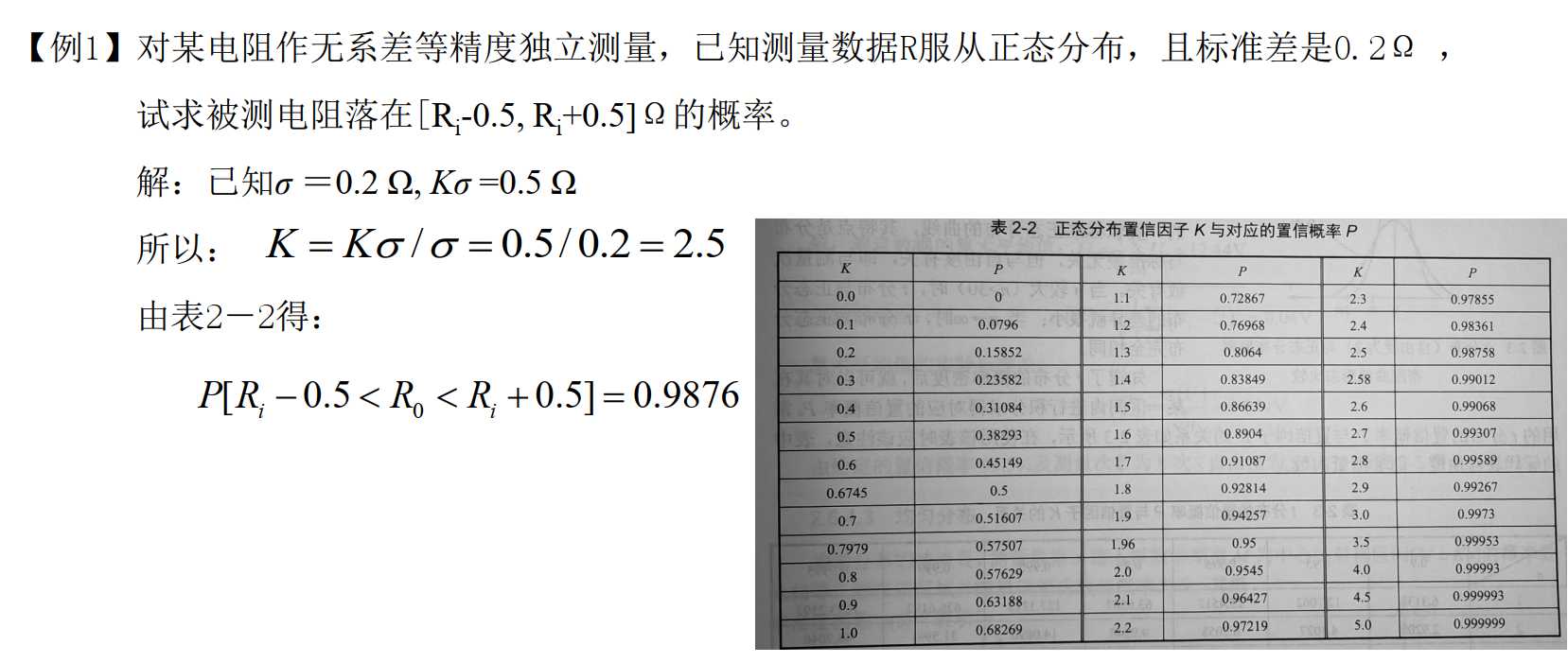
例题1:
例题2: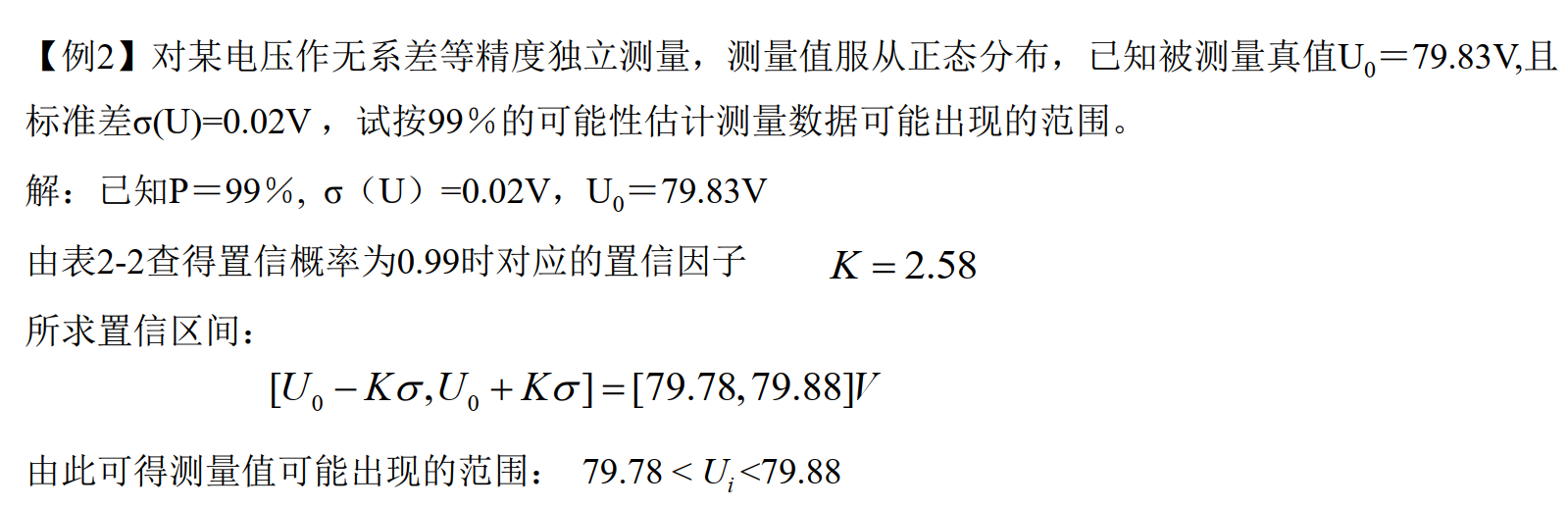
t分布的置信概率
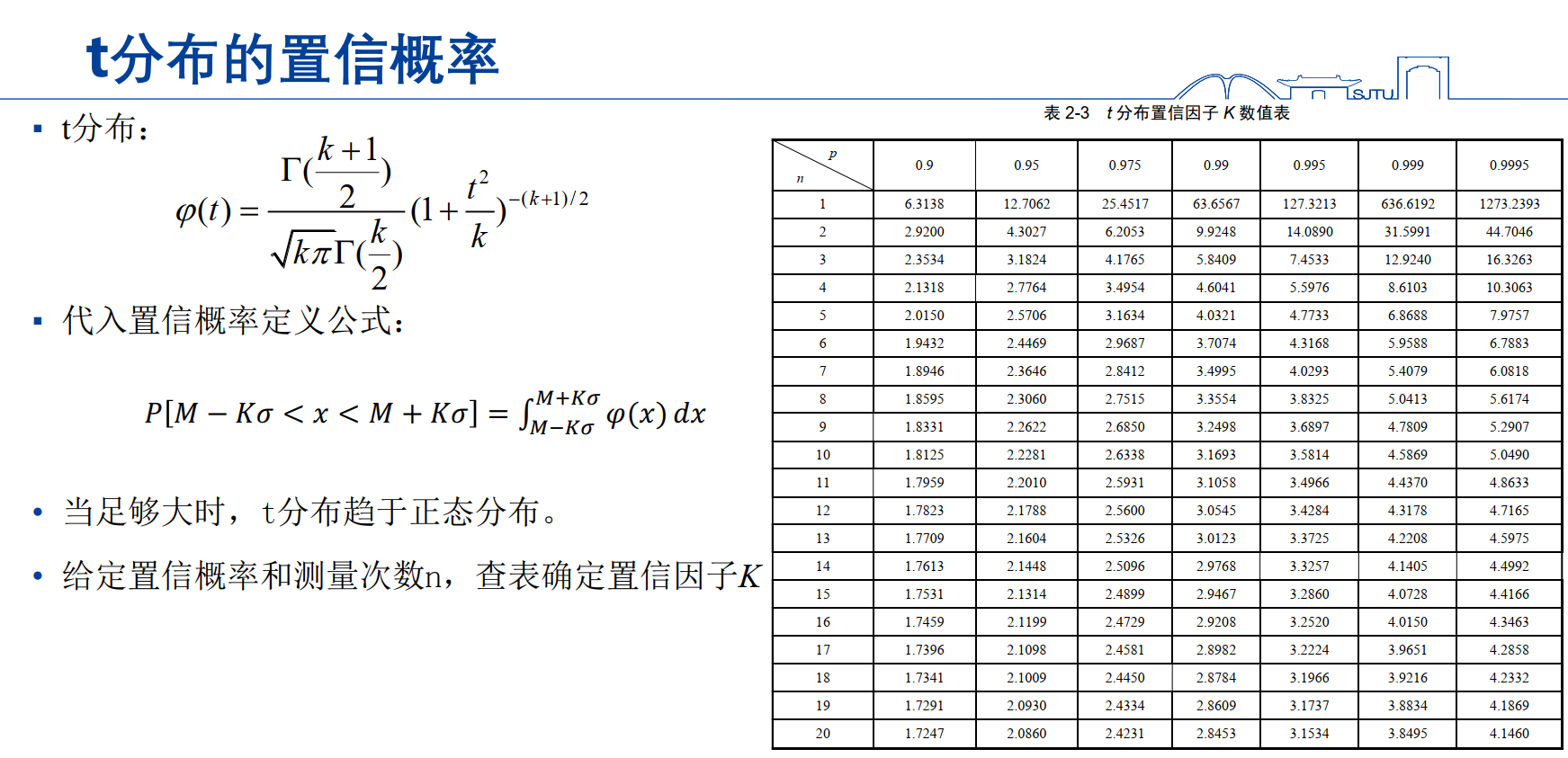
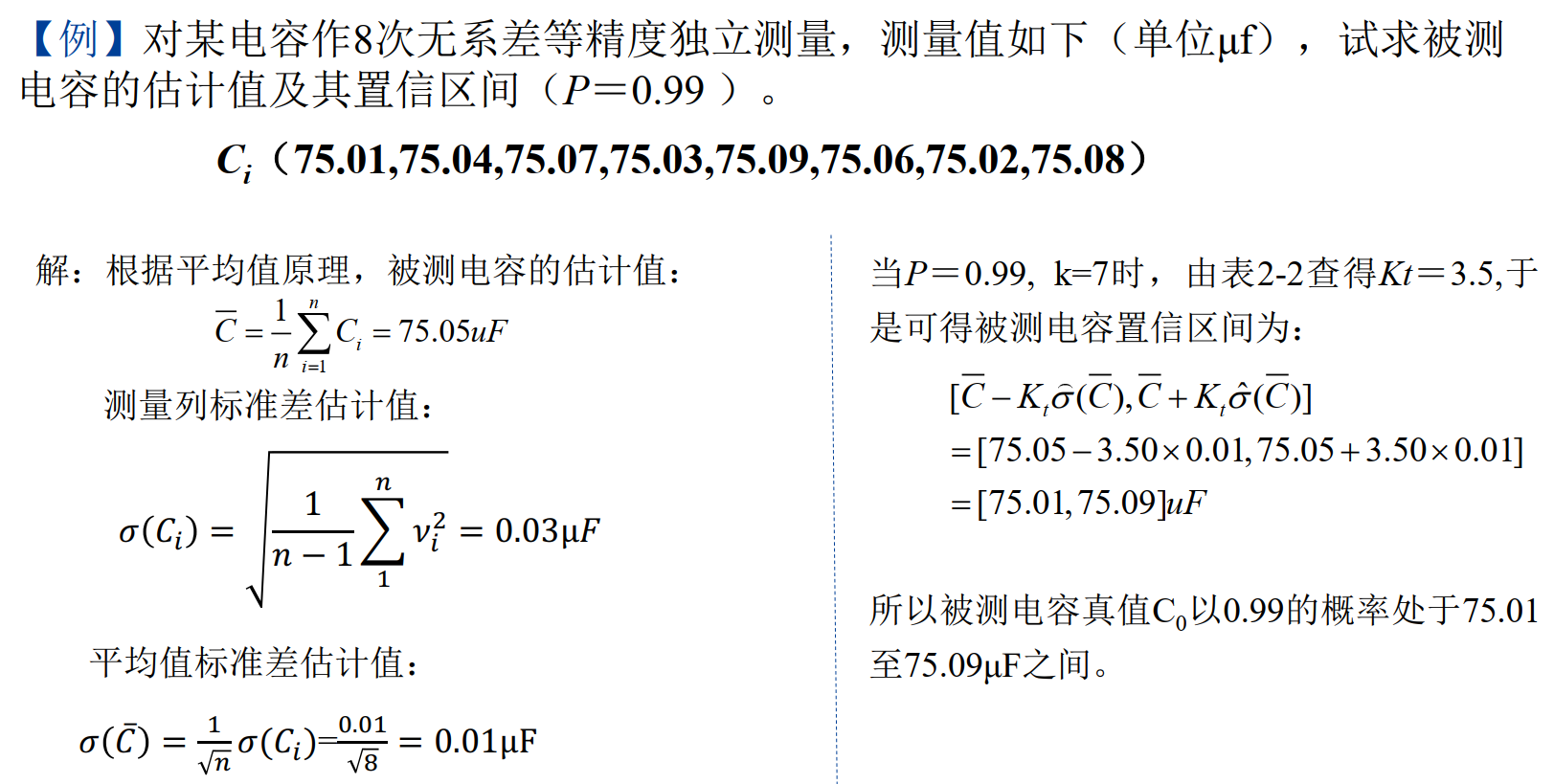
例题:
均匀分布的置信概率
结论:
- 均匀分布的测量误差不可能超过a,a为极限误差。
- 通常取
,此时误差的置信概率为100%。 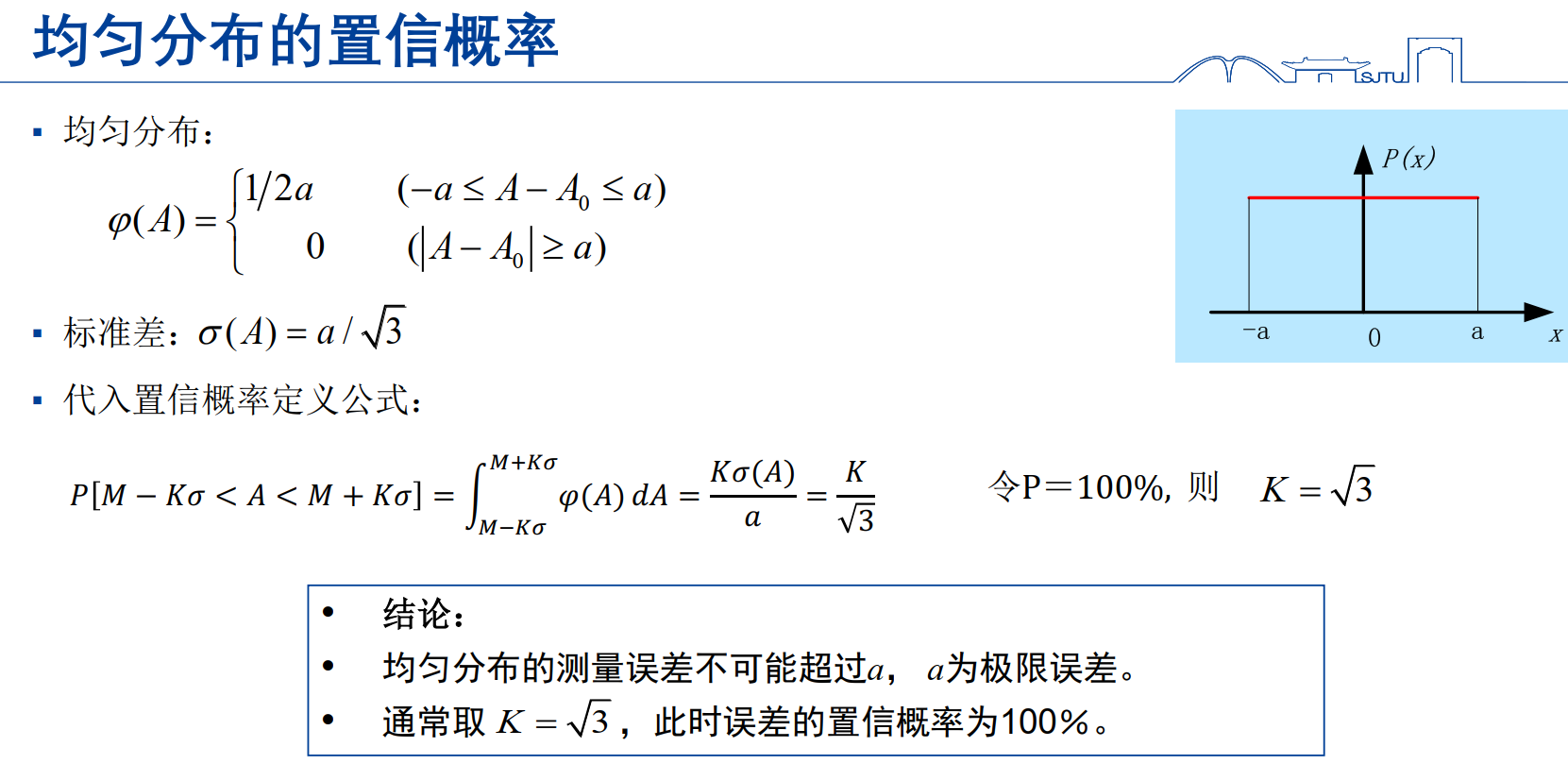
7 粗大误差的剔除
粗大误差产生原因:
- 测量人员的主观原因:操作失误或错误记录。
- 客观外界条件的原因:测量条件意外改变、受较大的电磁干扰,或测量仪器偶然失效等。
粗大误差出现的概率很小,处理方法是列出可疑数据,分析是否是粗大误差,若是,则应将对应的测量值剔除。
粗大误差的统计学判别准则: - 统计学的方法的基本思想:给定一置信概率,确定相应的置信区间,凡超过置信区间的误差就认为是粗大误差,并予以剔除。
- 在正态分布等精度测量中,随机误差大于3σ 的概率仅为0.27%,属小概率事件。
拉依达检验法
- 测量列
中 的随机误差为 ,当 时,测量值含粗大误差,应予以剔除。 - 在实际应用中使用剩余误差和标准差的估计值:
- 注意:当测量次数
时,该准则失效。
格拉布斯(Grubbs)检验法
当测量数据
的剩余误差 满足: ,则测量值含粗大误差,应予以剔除。 式中,
值由重复测量次数 及显著性水平 (超差概率 )确定,查表计算。
| 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 95% | 1.15 | 1.46 | 1.67 | 1.82 | 1.94 | 2.03 | 2.11 | 2.18 | 2.23 | |
| 99% | 1.16 | 1.49 | 1.75 | 1.94 | 2.10 | 2.22 | 2.32 | 2.41 | 2.48 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 95% | 2.29 | 2.33 | 2.37 | 2.41 | 2.44 | 2.47 | 2.50 | 2.53 | 2.56 | |
| 99% | 2.55 | 2.61 | 2.66 | 2.70 | 2.74 | 2.78 | 2.82 | 2.85 | 2.88 |
应注意的问题
① 所有的检验法都是人为主观拟定的,至今无统一的规定。当偏离正态分布和测量次数少时检验不一定可靠。
② 若有多个可疑数据同时超过检验所定置信区间,应逐个剔除,重新计算,再行判别。若有两个相同数据超出范围时,应逐个剔除。
③ 在一组测量数据中,可疑数据应很少。反之,说明系统工作不正常。
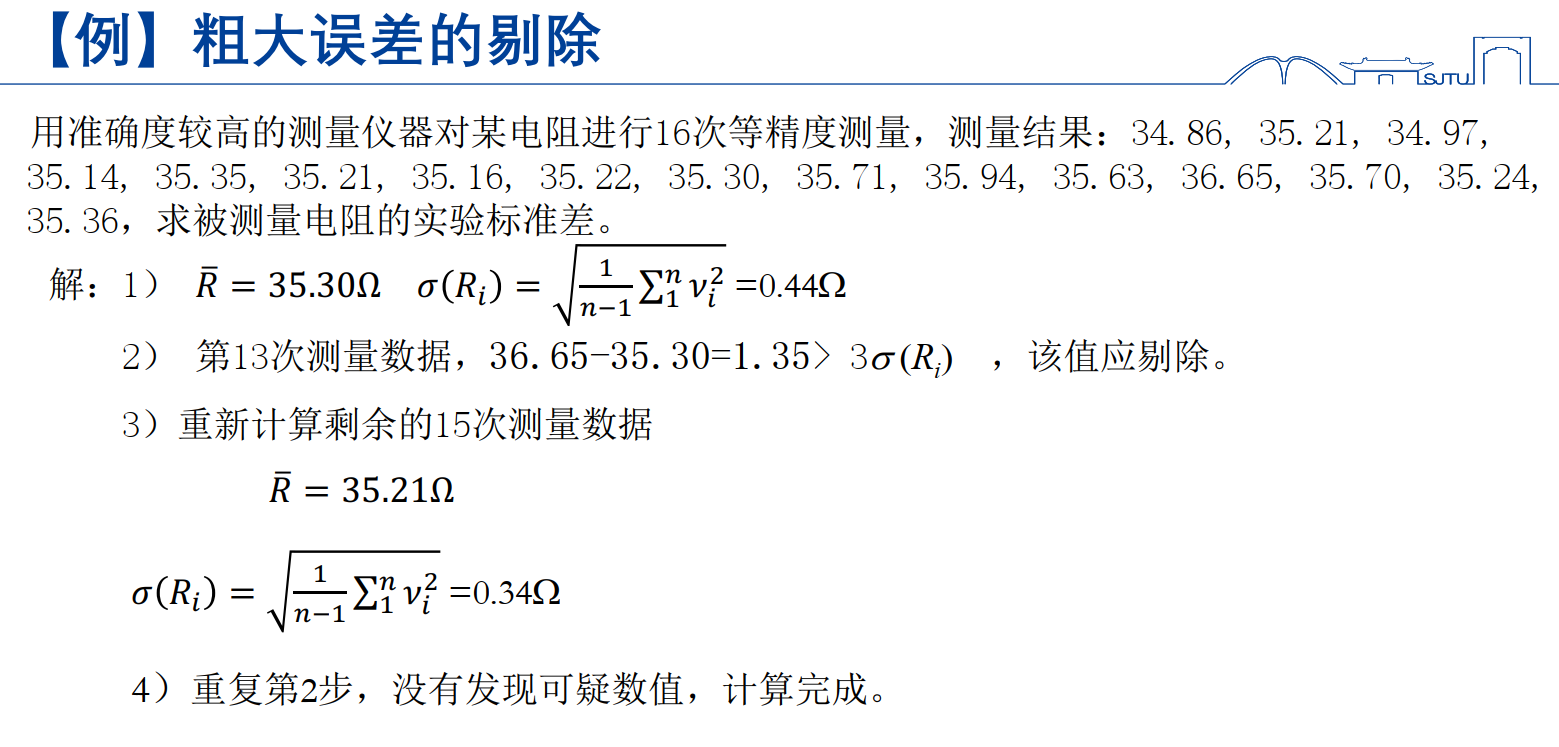
例题:粗大误差的剔除
8 测量不确定度及其评定方法
测量不确定度:
- 测量结果 = 估计值
测量不确定度U 单位(置信概率P) - 测量不确定度定义:根据所用到的信息,表征赋予被测量量值分散性的非负参数。
- 定量:测量不确定度U一般用标准差
和一个扩展因子K的乘积来表示,即: K就是在置信概率P 时的置信因子 - 当K =1时,对应的不确定度也被称为标准不确定度
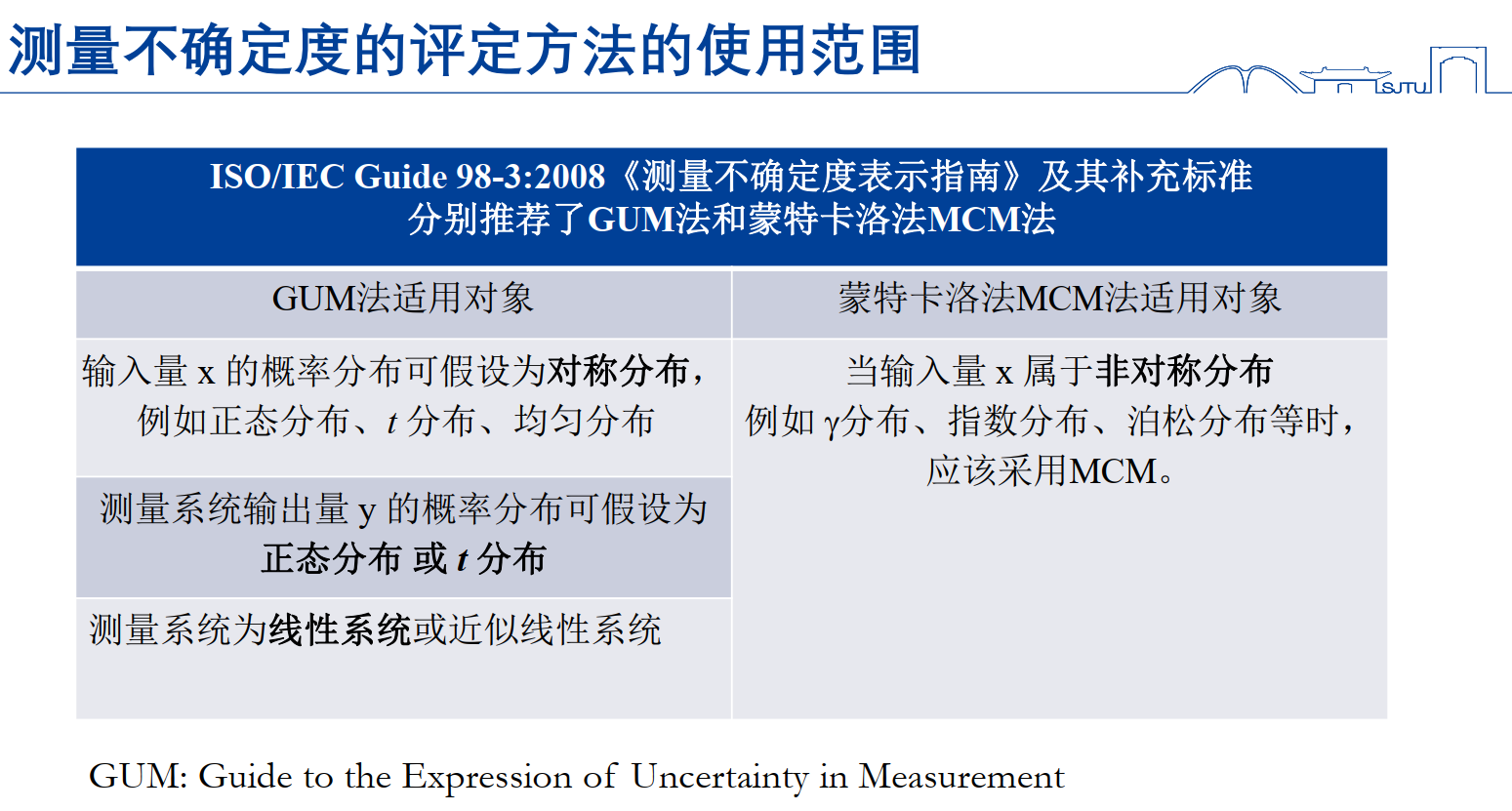
GUM法评定测量不确定度的一般步骤: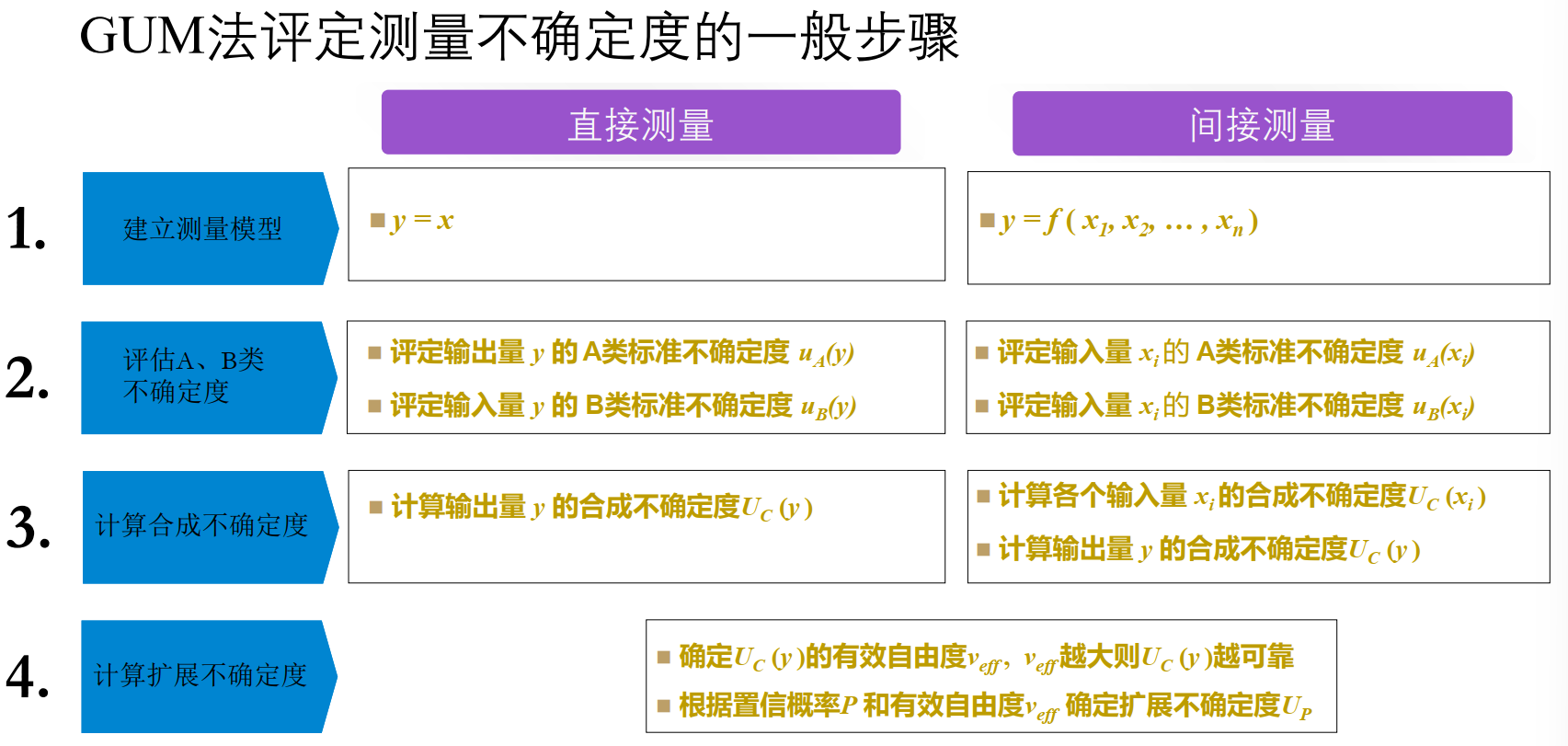
A、B类不确定度及其合成:
A类不确定度
- 在多次重复测量中,可以用统计学方法来计算测得值的估计值
及其标准差 ; - A类不确定度
就等于估计值 的标准差
- 在多次重复测量中,可以用统计学方法来计算测得值的估计值
B类不确定度
- 凡不符合统计规律的不确定度统称为B类不确定度,但GUM法评定B类不确定度也沿用了A类测量不确定中标准差的计算方法;
- 最常见的B类不确定度就是仪表误差导致的不确定度
合成(标准)不确定度
:
B类标准不确定度的评定
基本原则:借助于一切可利用的有关信息进行科学判断得到估计的标准偏差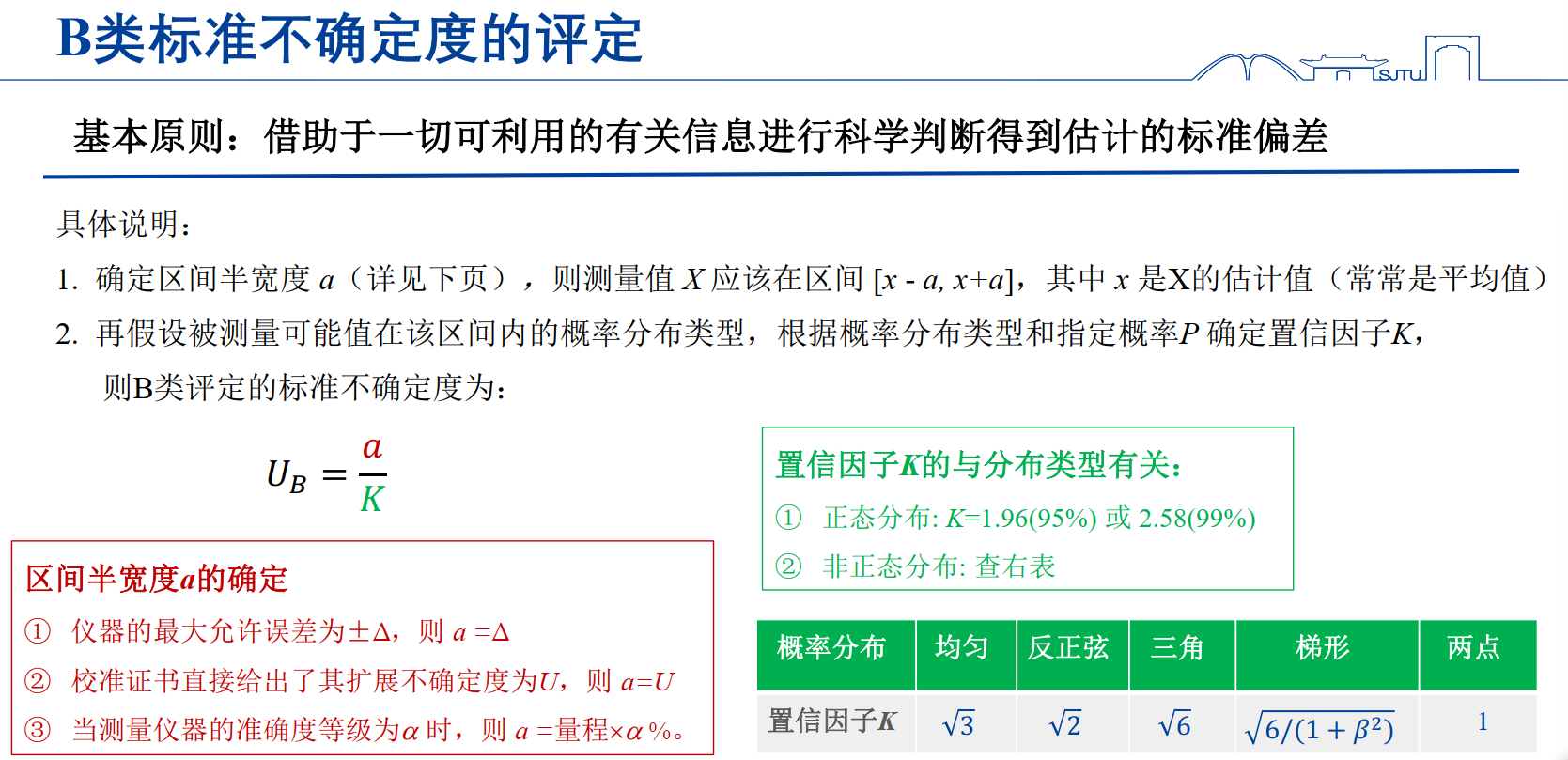
B类标准不确定度评定——关于概率分布的假设
- 被测量受多个相互独立的随机量的影响,当它们各自的效应是同等量级,无论各影响量的概率分布是什么形状,被测量的随机变化近似正态分布
- 如果有证书或报告给出的一定置信概率P 下的扩展不确定度UP,例如P=95%时的扩展不确定度U95,此时,除非另有说明,可以按正态分布评定标准不确定度
- 一些情况下,只能估计被测量的可能值区间的上、下限,被测量的可能值落在区间外的概率几乎为零。
- 若被测量的值落在该区间内的任意值的可能性相同,则可假设为均匀分布
- 若落在该区间中心的可能性最大,则假设为三角分布
- 若落在该区间中心的可能性最小,而落在该区间上限和下限处的可能性最大,则假设为反正弦分布
- 已知被测量的分布是两个不同大小的均匀分布合成时,则可假设为梯形分布
- 由数据修约、测量仪器最大允许误差或分辨力、参考数据的误差限、度盘或齿轮的回差、平衡指示器调零不准、测量仪器的滞后或摩擦效应导致的不确定度,通常假设为均匀分布
- 对被测量的可能值落在区间内的情况缺乏了解时,一般假设为均匀分布
扩展不确定度
扩展不确定度
有效自由度
有效自由度的计算
韦尔奇-萨特思韦特公式
当测量模型
中各输入量 相互独立, 的不确定度为 ,对应的自由度为 ,输出量Y接近正态分布或 t 分布时,合成不确定度 的有效自由度 按公式(1)计算:
且当测量模型为
,合成不确定度 的有效自由度按公式(2)计算更方便
相对不确定度
B类不确定度的有效自由度
B类不确定度
有效自由度的计算结果应取整数;
式中,
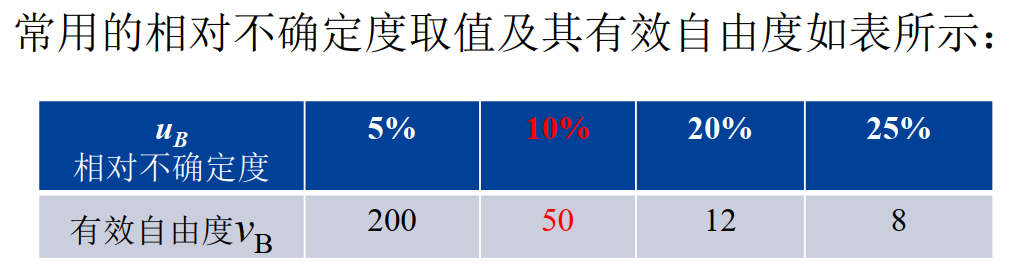
常用的相对不确定度取值及其有效自由度如表所示:
| 相对不确定度 |
5% | 10% | 20% | 25% |
|---|---|---|---|---|
| 有效自由度 |
200 | 50 | 12 | 8 |
间接测量中不确定度的传播与合成
若被测量
且
两类函数关系式不确定度合成的简便计算
(1) 当
合成标准不确定度可用下式计算:
(2) 当
合成标准不确定度可用下式计算:
例1:有效自由度的计算
设,其中 、 、 的估计值 、 、 分别是 、 、 次测量的算术平均值, , , 。它们的相对标准不确定度分别为 , , 。
解:的(A类)相对不确定度为:
有效自由度为:
例2:直接测量中扩展不确定度计算
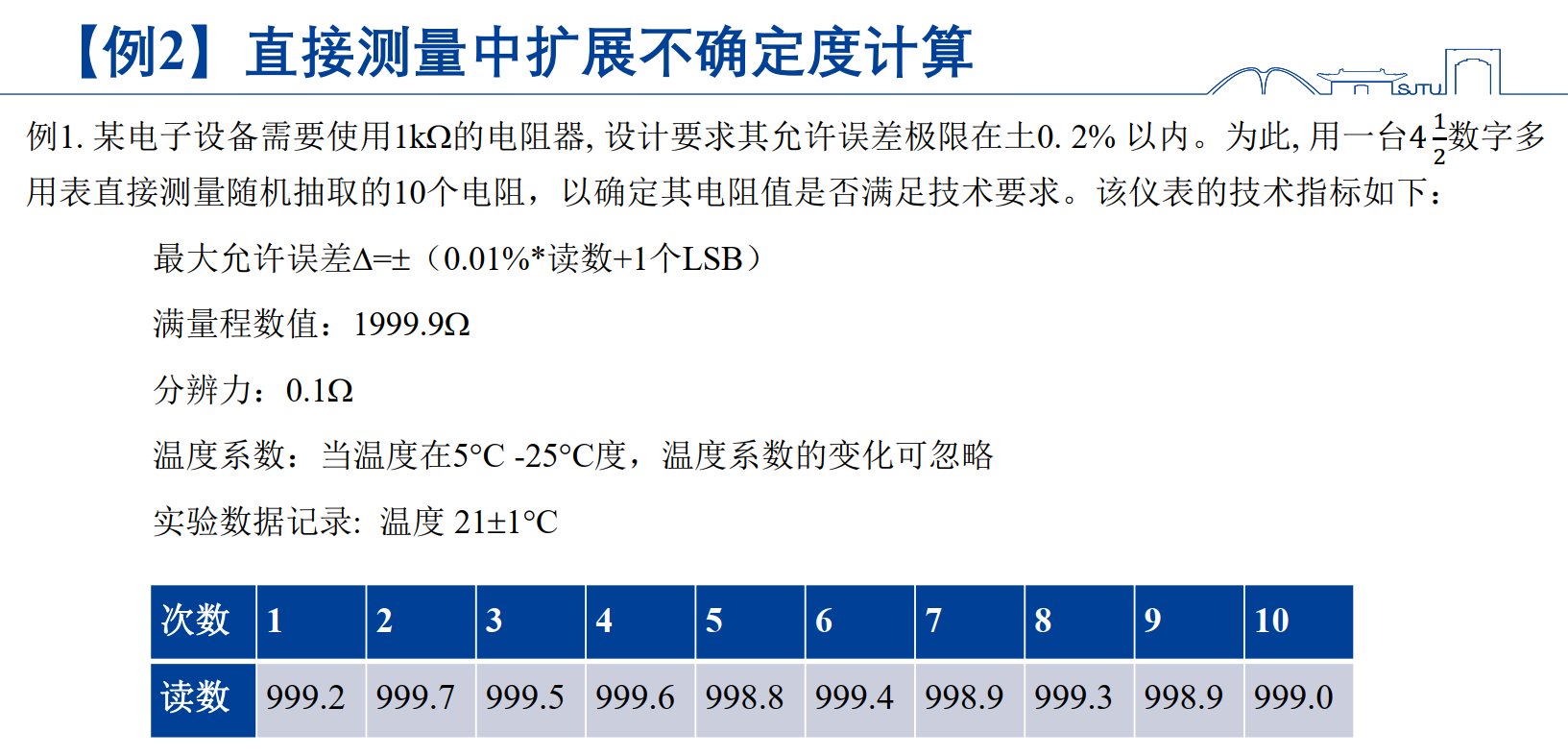
- A类不确定度的评定
针对重复测量结果不一致,采用A类不确定度评定,标准A类不确定度- B类不确定度的评定
采用B类不确定度来评定仪表误差。根据仪表的技术指标,得到最大允许误差即区间半宽度
$$a=\Delta=0.01%999.2\Omega + 10.1\Omega = 0.2 \Omegau_B = \frac{a}{K} = 0.1\Omega$$
假设的相对不确定度为10%,计算得 - 计算扩展不确定度,报告测量结果
合成不确定度
有效自由度
按t分布查表,时,扩展因子 ,扩展不确定度为
测量结果:( )
标称值 估计值 偏差 最大允许误差 估计值的不确定度 1000Ω 999.2Ω 0.8Ω ±1000Ω*0.2%=±2Ω 0.4Ω(P=99%, K=3.5) 检定结论:合格
例3:间接测量中合成不确定度的计算
已知电阻(Ω), (Ω),求它们串联的电阻R和合成标准不确定度
解:串联电阻的阻值为
合成不确定度
相对不确定度
测量结果为
第三章 常用传感器及其调理电路
1 传感器概述
定义:能感受规定的被测量并按一定的规律转换成可用输出信号的器件或装置
特点:
- 对被测量具有较好的灵敏度和最佳的选择性
- 输出信号适合远距离传送,如电信号、光信号和气动信号
- 输入输出关系有规律,可复现
传感器处于测量系统的最前端,起着获取信息与转换信息的重要作用。具有联网能力的传感器是物联网的终端节点。
传感器分类: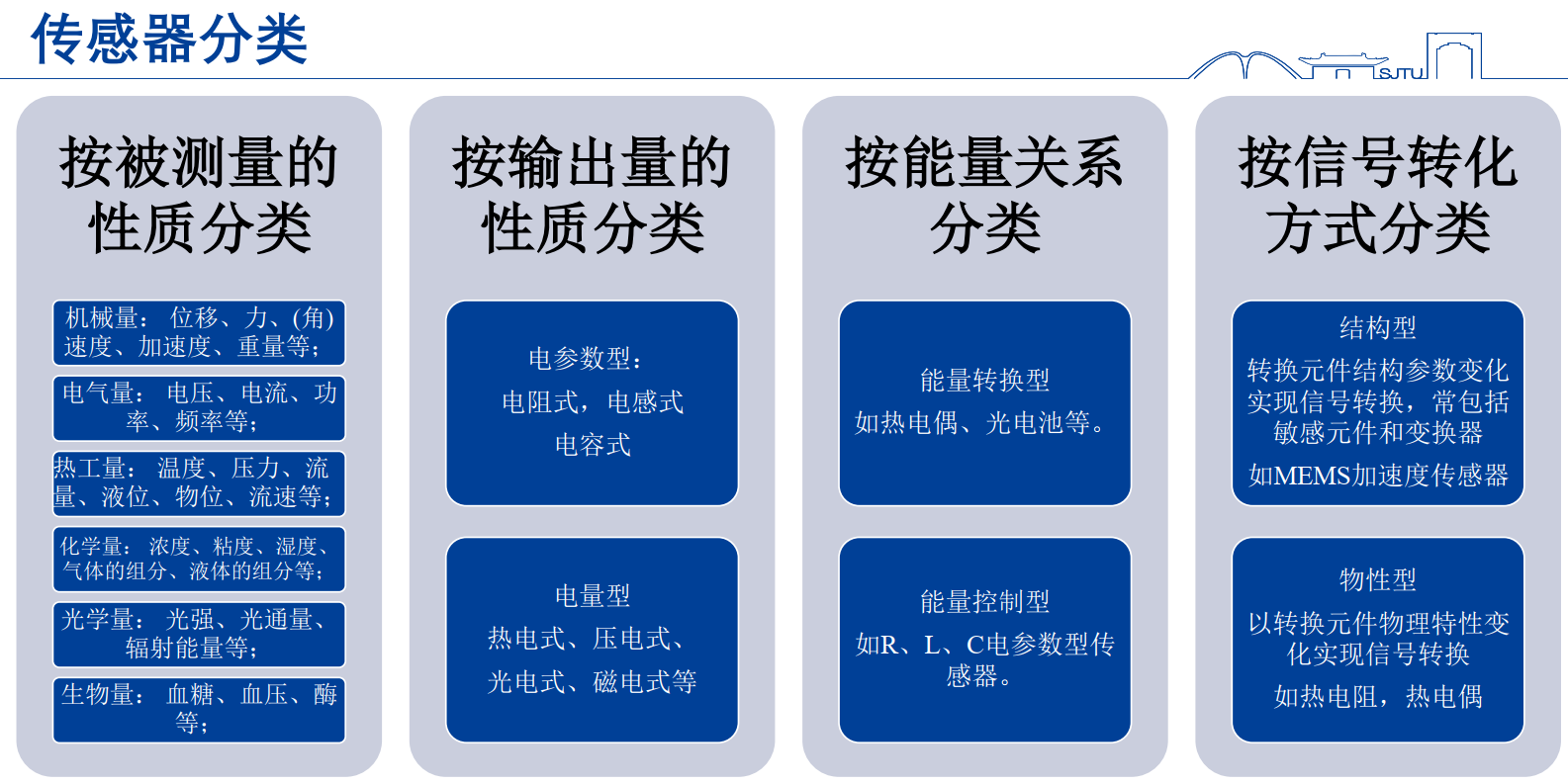
传感器的组成结构(结构型传感器):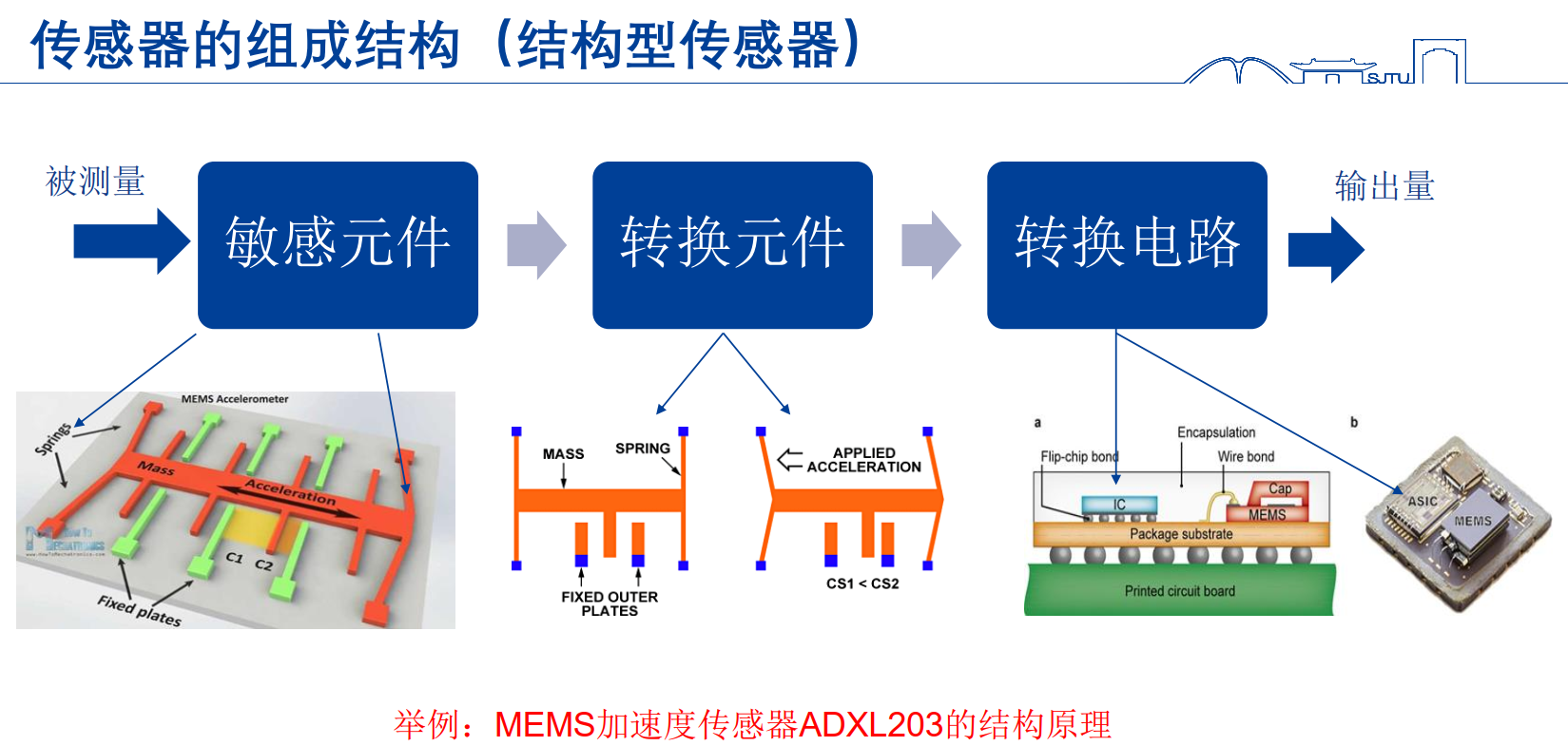
变送器定义:将被测量按一定规律转化为标准输出信号的装置
标准输出信号:
- 标准电流信号: 4-20mA电流环 (长距离传输的抗干扰能力强)
- 标准电压信号: 1-5V(DC) (适于传输给多个其它测量环节)
- 标准气动信号: 20-100kPa
变送器的特点:
- 变送器一般在输入端连接传感器
- 输出信号标准化 ,而传感器输出一般是非标小信号
- 变送器常常具有数字通信口,例如 RS-232C、 RS-485、 HART,可以在线设置变送器的测量范围等参数
2 金属温度传感器
工作原理:正温度系数:金属导体的电阻率随温度变化而增大
典型金属热电阻:铂电阻、铜电阻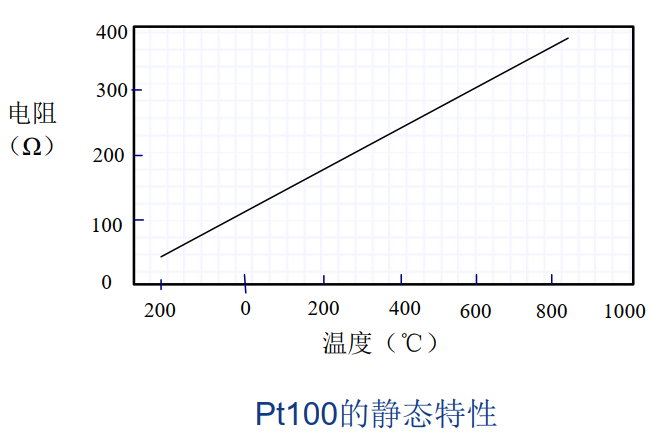
金属热电阻材料一般要求
- 温度系数、电阻率较高 → 提高灵敏度,体积小,反应快
- 理化性能稳定 → 提高稳定性和准确性,复现性好
- 良好的输入-输出特性 → 线性/接近线性,测量准确度高
- 良好的工艺性 → 批量生产,降低成本
- 较大的测温范围 → 特别是在低温范围
- 适合的材料:纯金属 —铂、铜、镍、铁
铂电阻(Pt)
结构
金属铂丝绕在绝缘骨架上制成绕线电阻输入输出特性:近似线性
特点
Pros: 在高温和氧化介质中性能稳定,工艺性好
Cons: 成本较高,温度系数偏小,非线性接线制
- 两线制:电极引线短,引线电阻可忽略
- 三线制:电极引线长,需考虑引线电阻
- 四线制:消除接触电阻(Kelvin夹原理)
铜电阻(Cu)
结构
金属铜丝绕在绝缘骨架上制成绕线电阻输入输出特性:近似线性
Cu50、Cu100对应的
特点
Pros: 成本较低,工艺性好
Cons: 高温易被氧化,易被腐蚀,电阻率低,非线性比大 接线制
① 两线制:电极引线短,引线电阻可忽略
② 三线制:电极引线长,需考虑引线电阻
③ 四线制:消除接触电阻(Kelvin夹原理)
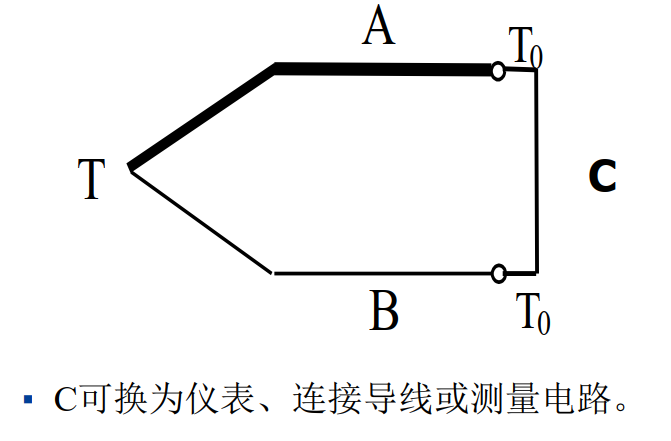
3 热电偶
Seeback效应:在回路中产生与两结点温差有关的热电势
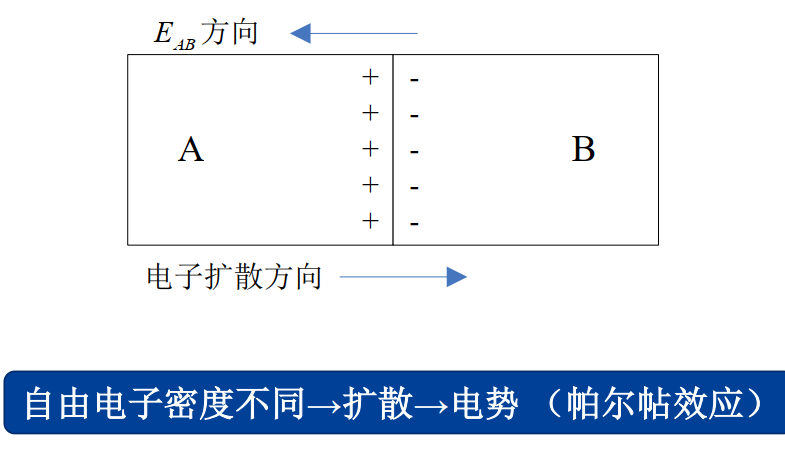
帕尔帖效应:不同金属导体接触,自由电子由于浓度不同而在接触面附近出现扩散现象,从而形成一个稳定的电位差,叫做帕尔帖电势或接触电动势。 大小可表示为 :
式中:
汤姆逊效应:在一根匀质的金属导体中,如果两端温度不同,高温端自由电子的扩散速率比低温端自由电子的扩散速率大,温度较高的一边因失去电子而带正电,温度较低的一边因得到电子而带负电,从而形成了温差电势。
当导体两端的温度分别为
式中
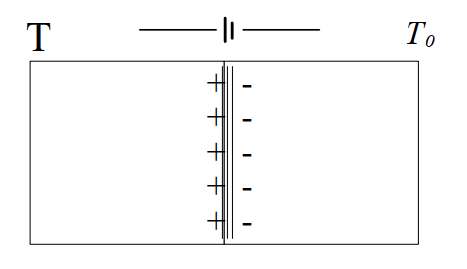
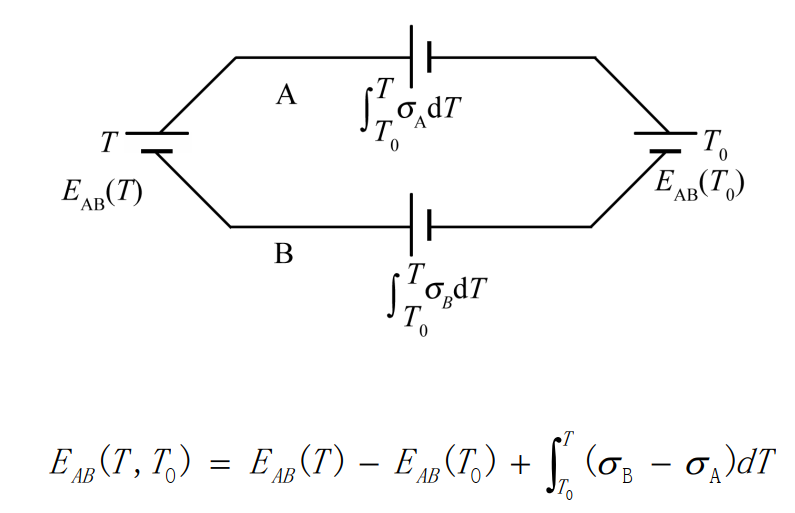
对于匀质导体A、 B组成的热电偶,其总电势为接触电势与温差电势之和。
热电效应:
- 必须由两种不同的材料才能构成热电偶
- 如果热电偶两结点温度相同,则回路中的总电势必等于零。
- 热电势的大小只与材料和结点温度有关,与热电偶的尺寸、形状及沿电极温度分布无关。
中间导体定律:在热电偶回路中接入第三种材料的导线,只要其两端的温度相等,第三导线的引入不会影响热电偶的热电动势。
热电偶的主要技术参数:
允许误差:热电偶的热电势 ⎯温度关系对分度表的最大偏差
测量范围:不同分度号的热电偶,有不同的使用温度极限,最高可达1700度
热响应时间:也称时间常数,用来表示热电偶对温度变化响应快慢的热惰性参数。热响应时间用
热电偶的连接方式:
- 热电偶正向串联:可获得较大的热电势输出提高灵敏度
- 热电偶反向串联:可以测量两点间的温差
- 热电偶并联:可以测量多点平均温度
4 热敏电阻
材料:陶瓷材料、高分子材料
测量范围:-100
热敏电阻分类
- NTC: 负温度系数热敏电阻
- PTC: 正温度系数热敏电阻
- CTR: 临界温度系数热敏电阻
NTC和PTC的应用
| 材料 | 用途 | 举例 |
|---|---|---|
| NTC 或 PTC | 温度测量 | 家用空调进风口和出风口温度测量 |
| NTC | 温度补偿 | 带温度补偿的石英晶体振荡器 |
| NTC | 浪涌抑制 | 抑制开关电源、电动机、白炽灯接通瞬间的浪涌电流 |
| PTC | 恒温加热元件 | 自控温电热器、恒温电烙铁 |
| PTC | 过载保护 | 自恢复保险丝 |
5 霍尔传感器
霍尔效应:金属导体或半导体薄片处于磁场中,当垂直于磁场方向有电流流过时,在垂直于电流和磁场的方向上将产生电动势的现象
具有霍尔效应的元件称霍尔元件。
霍尔传感器由霍尔元件和电子电路组成。金属材料的自由电子浓度n很高, RH很小。半导体的电子浓度n适中,霍尔传感器中
的霍尔元件都是由半导体材料构成,多用N型半导体材料。霍尔元件越薄, KH越大,所以霍尔元件都是薄片状。
霍尔钳形电流表既可测交流也可测直流,而CT型钳形电流表只能测交流电流
6 磁阻传感器*
不做要求。
7 电场测量探头*
不做要求。
8 电涡流传感器*
不做要求。
9 压电传感器
正压电效应:① 压电元件沿着一定方向受到外力作用时,内部就产生极化现象,同时在某两个表面上产生符号相反的电荷Q, 当外力去掉后,又恢复到不带电状态;② 当作用力方向改变时,电荷的极性也随着改变;③ 电荷量Q与外力的大小成正比 Q=kF
逆压电效应:对晶体施加一定电场E,晶体本身将产生机械形变
压电材料:压电晶体、压电陶瓷、高分子压电材料
压电元件的绝缘电阻以及后级调理电路的输入阻抗不可能是无穷大,所以压电材料上产生的电荷会发生泄漏,因此压电
式传感器不适合静态测量。但压电材料在交变力的作用下,电荷可以不断补充,故适用于动态测量。
压电元件的信号传递存在的问题:输出电压与电容C= Ca + Ci +Cc密切相关,虽然Cc和Ci都很小,但与Ca大小接近而不可忽略。Cc会随连接电缆的长度与形状而变化,从而会给测量带来不稳定因素,影响传感器的灵敏度。
10 光电传感器
光电效应就是指一束光线照射到物质上时,物质的电子吸收了光子的能量而发生了相应的电效应现象。那么,产生光电效应的这种物质就叫光电材料。
光电效应及其种类
(1) 外光电效应:在光线照射下,使电子从物体表面逸出的现象。如光电管、光电倍增管等。
(2) 内光电效应:在光线照射下,使物体的电阻率发生改变的现象。如光敏电阻等。
(3) 光生伏特效应:在光线照射下,使物体产生一定方向的电动势的现象。如光敏二极管、光敏三极管、光电池等。
光敏电阻:光照射在光敏电阻上,导电性能增加,电阻值下降。
光敏二极管:半导体光生伏特效应。光敏二极管工作时外加反向工作电压,在没有光照射时,反向电阻很大,反向电流很小,此时光敏二极管处于截止状态。当有光照射时,在PN结附近产生光生电子和空穴对,从而形成由N区指向P区的光电流,此时光敏二极管处于导通状态。
光敏三极管:当光照射在基极-集电结上时,就会在集电结附近产生光生电子-空穴对,从而形成基极光电流。集电极电流是基极光电流的β倍。比光敏感二极管灵敏许多。
光电信号的检测方法:a)透射法 b)反射法 c)辐射法 d)遮挡法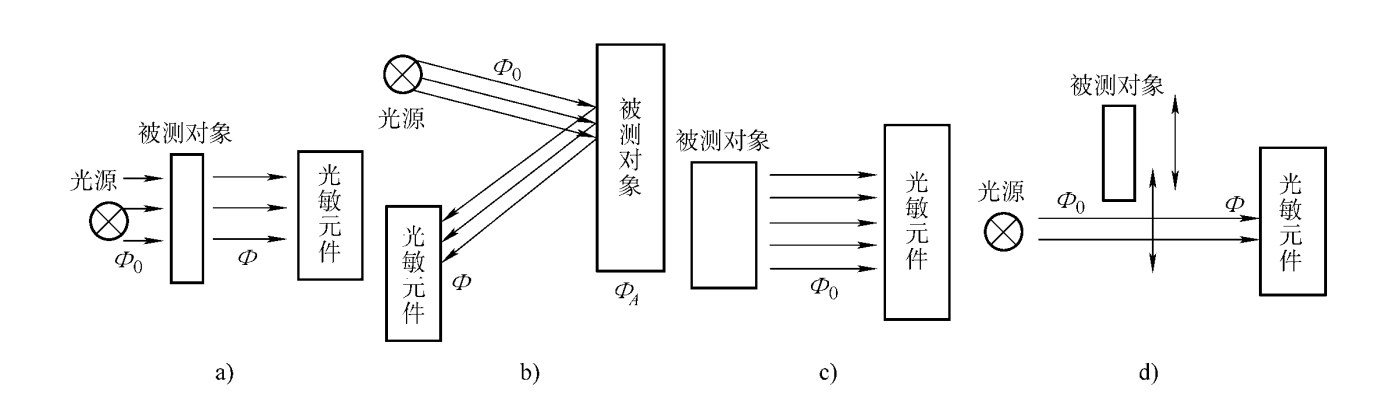
旋转光电编码器:
用途:旋转编码器是一种反馈旋转运动的角度、位置、速度或加速度的数字式传感器
类型:
- 绝对值编码器。 输出信号:代表绝对角度的一个编码
- 增量编码器 输出信号:相差90°的A、 B脉冲和零位Z脉冲。单圈输出脉冲数(PPR)或分辨率:最高50000-100000PPR,低端1024-5000PPR
增量式光电编码器:在圆盘上等角距地开有能透光的两圈缝隙,内缝隙A和外缝隙B相错半条缝,最外圈开有一个透光狭缝表示码盘零位。在码盘的一侧装有发光二极管,另一侧装有光敏三极管,码盘通过转动轴连接,这样当轴转动时,接受端可获得A、 B两路正交的(相差90) 脉冲信号。
绝对式编码码盘:码盘上有N条码道,每条码道被分为透光和不透光的区域, N条码道可以输出2N个二进制编码,每个编码对应一个绝对角度, 它是将旋转设备的位移信息通过二进制编码的方式变成数字量直接输出。
格雷码码盘:抗扰动能力优于二进制码盘
11 电容式传感器
平板电容器若忽略其边缘效应,其电容量C为
常见类型:变气隙式 变面积式 变介电常数式
- 变间隙型:固定
, , 与 为非线性关系 - 变面积型:固定
, , 与 为线性关系 - 变介电常数型:固定
, , 与 为线性关系
其中,变气隙式特点是灵敏度高,但非线性严重。
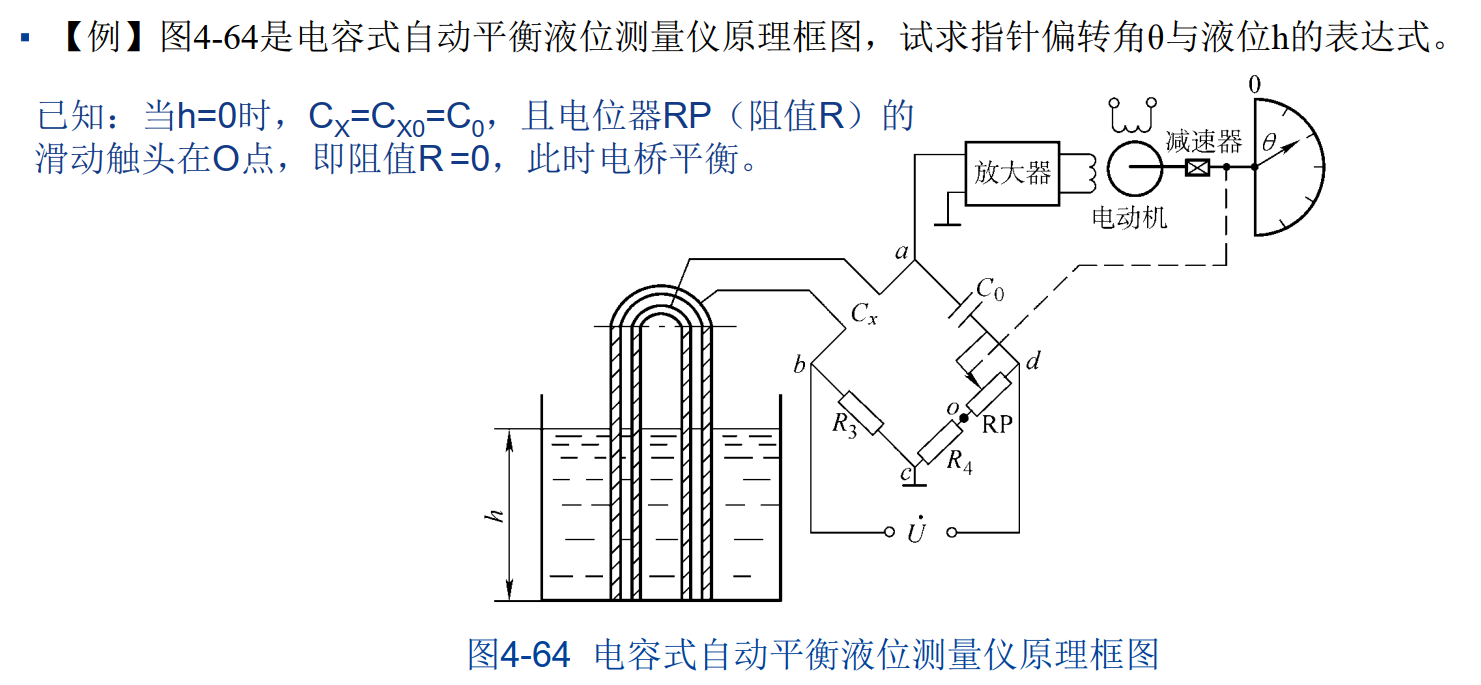
差动电容传感器:由于变气隙式电容传感器的非线性严重,实际上是很少使用的,通常制成差动型式,其差动结构的传感器配合差动电桥,可以显著改善非线性,提高灵敏度。
差动结构的传感器配合差动电桥,可以显著改善非线性,提高灵敏度。
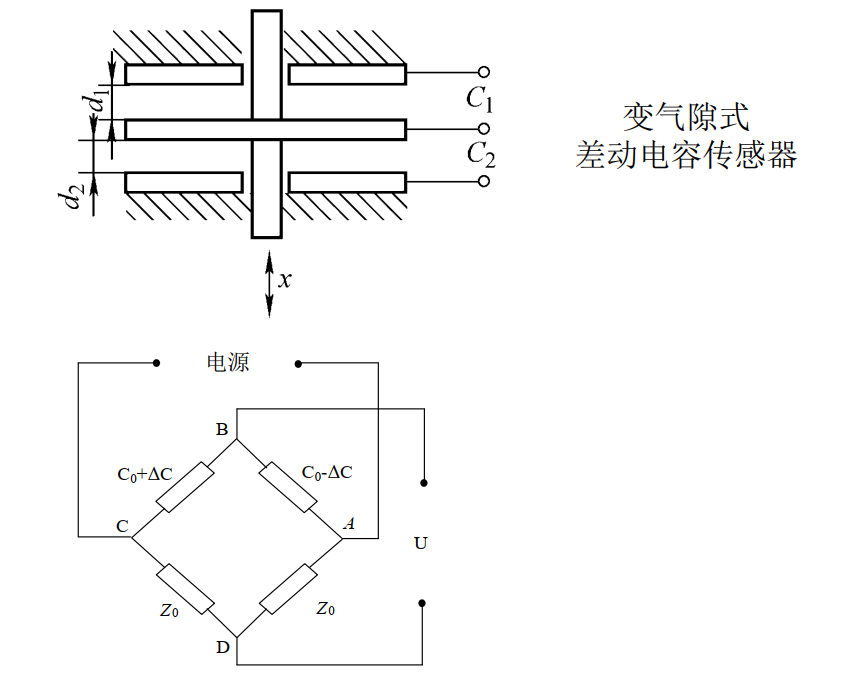
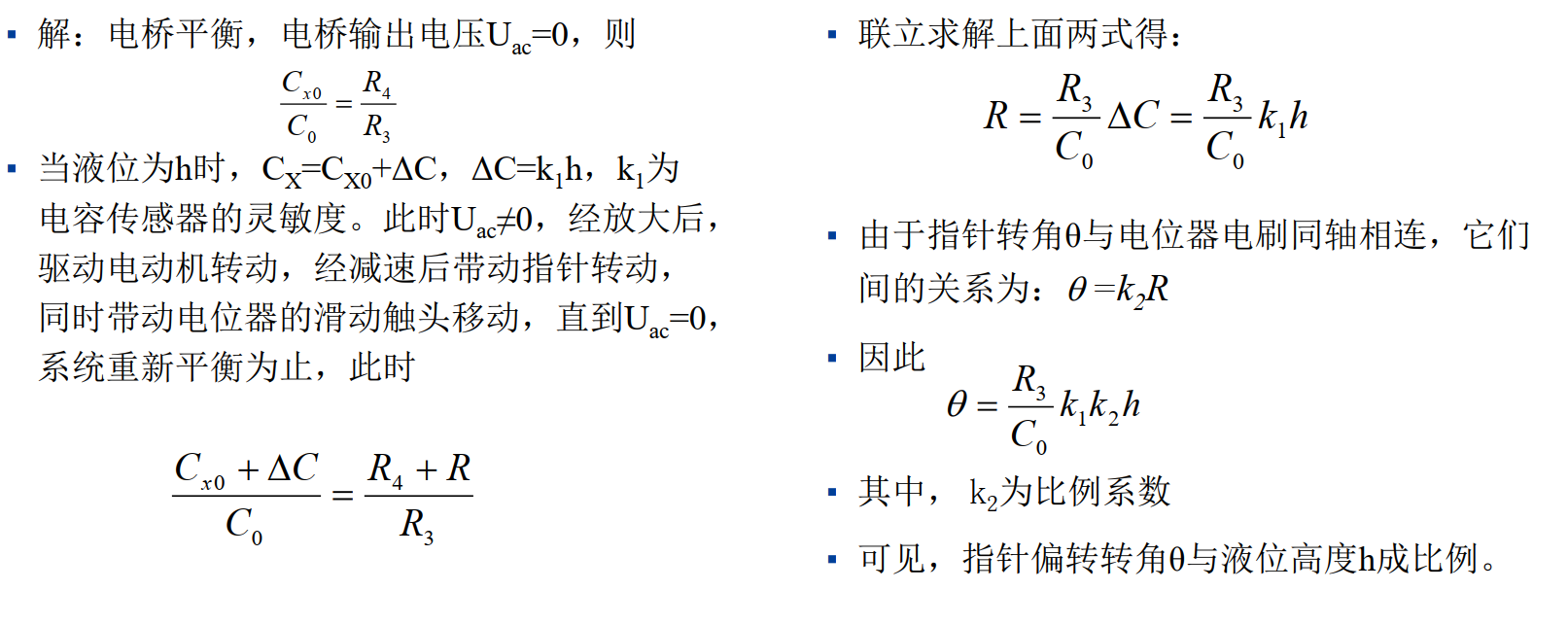
例题:
12 电感式传感器
基本原理: 利用自感或互感的变化来实现测量
被测量: 位移、振动、压力、流量、重量、力矩等
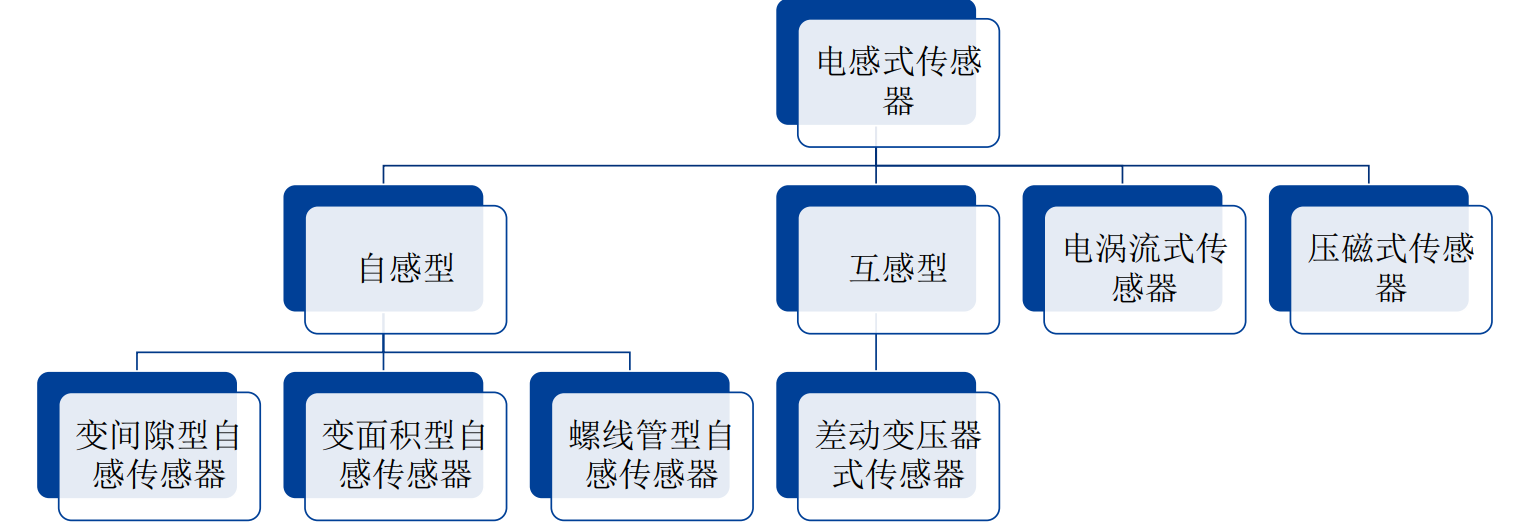
简单自感式传感器的原理及特性:a)变气隙式 b)变面积式 c)螺管式
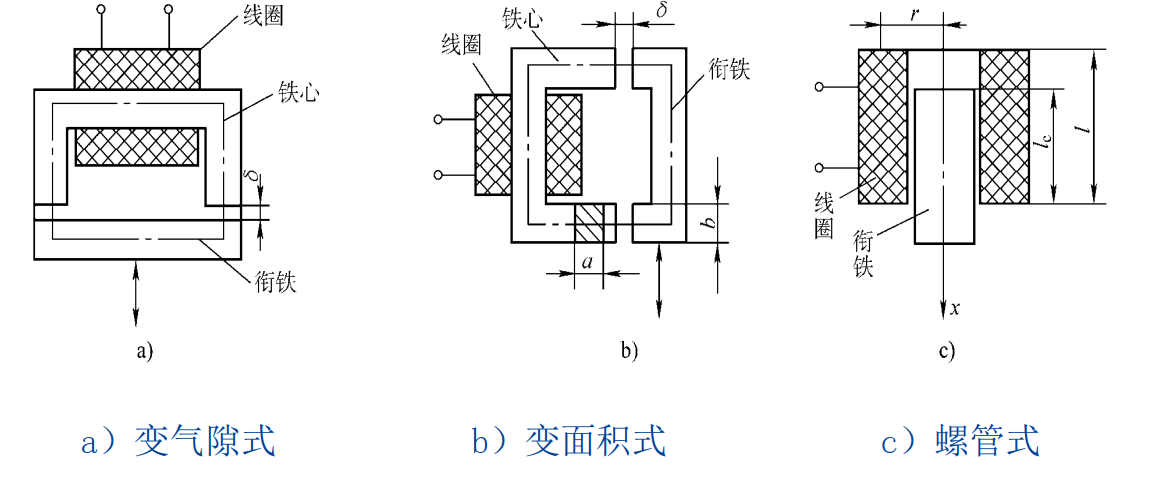
- 变气隙式自感传感器由于存在非线性,常常用差动结构的传感器来减小非线性。
- 变截面积式自感传感器测量范围较大,非线性误差小,但灵敏度较低
- 用两个相同的传感线圈共用一个衔铁, 构成差动式电感传感器。差动式电感传感器可以传感器的减小非线性,并且可以提高灵敏度。
13 差动传感器与测量电桥
电桥是将电阻、电感、电容或阻抗参量的变化转换为电压或电流输出的一种测量电路。
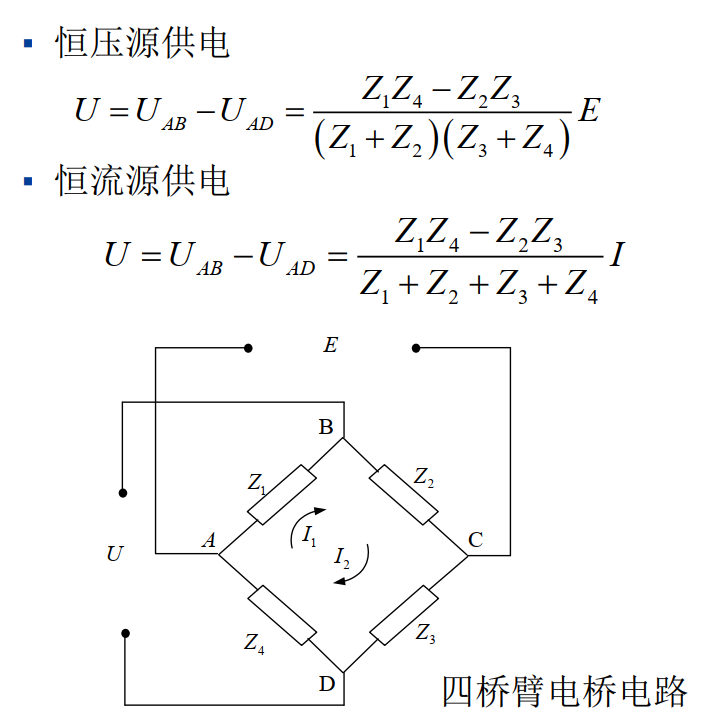
按照电桥桥臂阻抗的差动特点,可以分为:单臂电桥、差动半桥、差动全桥
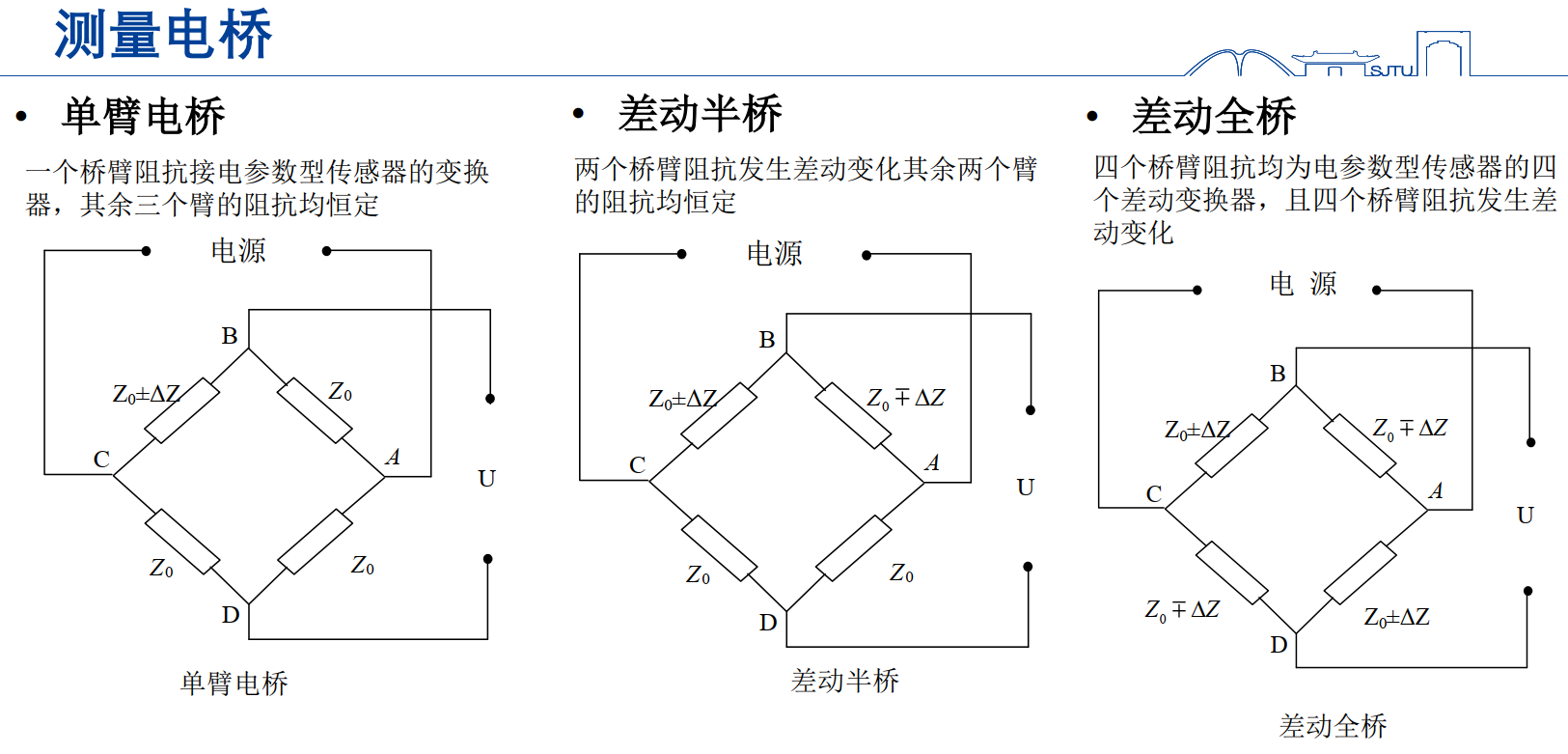
测量电桥的结论
- 与单臂电桥相比,差动电桥灵敏度更高、非线性误差更小,对同符号干扰有低偿作用;
- 差动传感器与差动电桥相配合,能使测量系统具有更加优良的特性;
- 恒流源供电的差动全桥理论上无温度误差
交流电桥存在的问题:变压器式交流电桥无法区分衔铁移动方向。需要引入鉴相环节。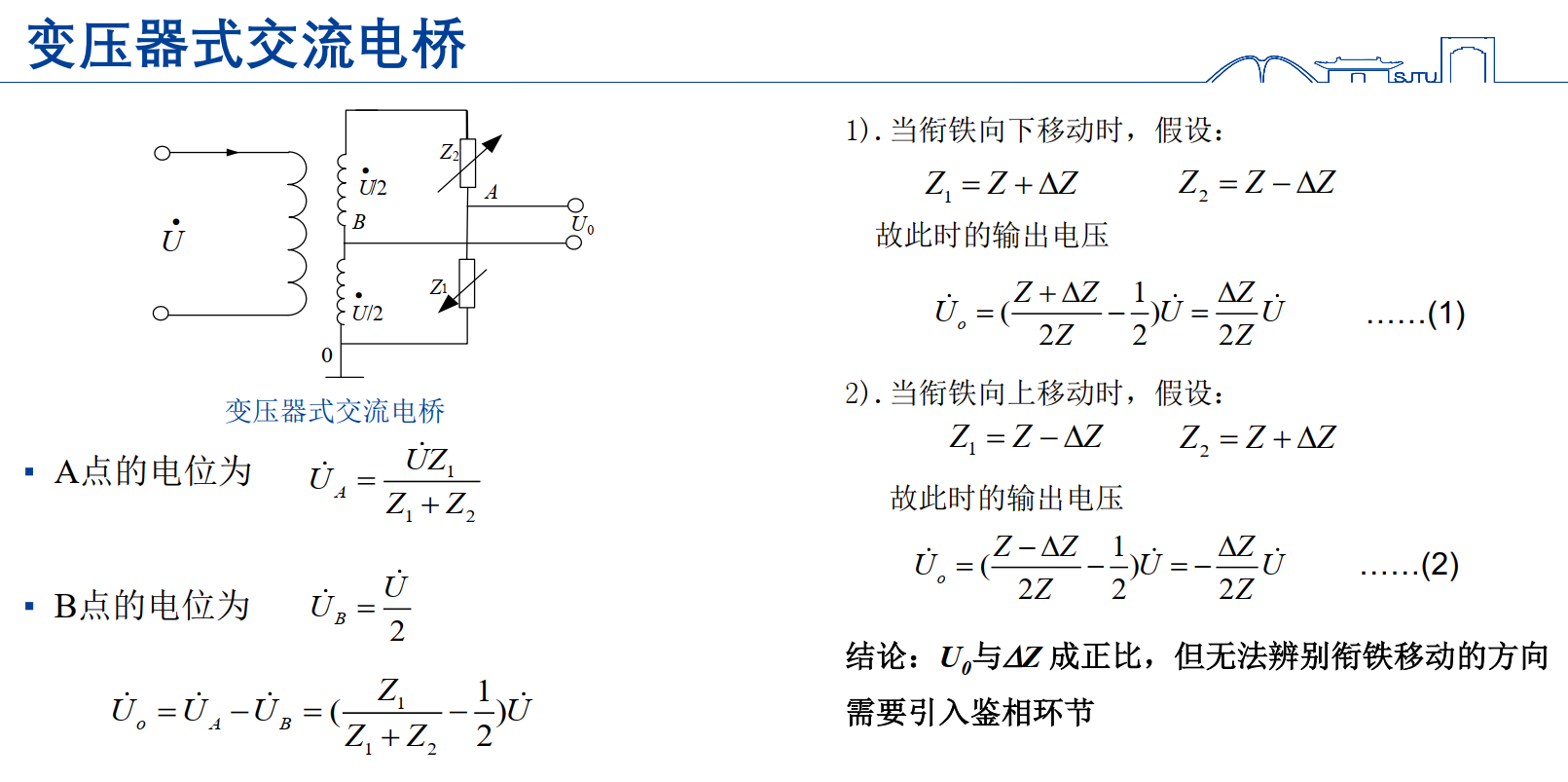
第四章 集成运放
1 信号调理电路中的集成运放
- 集成运算放大器是调理电路的核心器件
- 集成运算放大器的主要功能:电压放大、共模抑制、阻抗转换
- 集成运放 + 外围阻容器件 = 集成运放电路
- 共模电压 + 差模电压 = 差分电压
理想集成运放
- 理想的
无穷大,所以虚断 - 理想的
无穷大,所以虚短 - 理想的
- 虚地Not Always True. 只有当两个输入中的一个接地,因为虚短,另一个输入可视为虚地
实际集成运放有多不理想?
- 输入电阻
,“虚断”了吗?电流在 以下 - 开环放大倍数
,“虚短”了吗?电位差在 以下 约在100欧姆数量级
基本放大电路

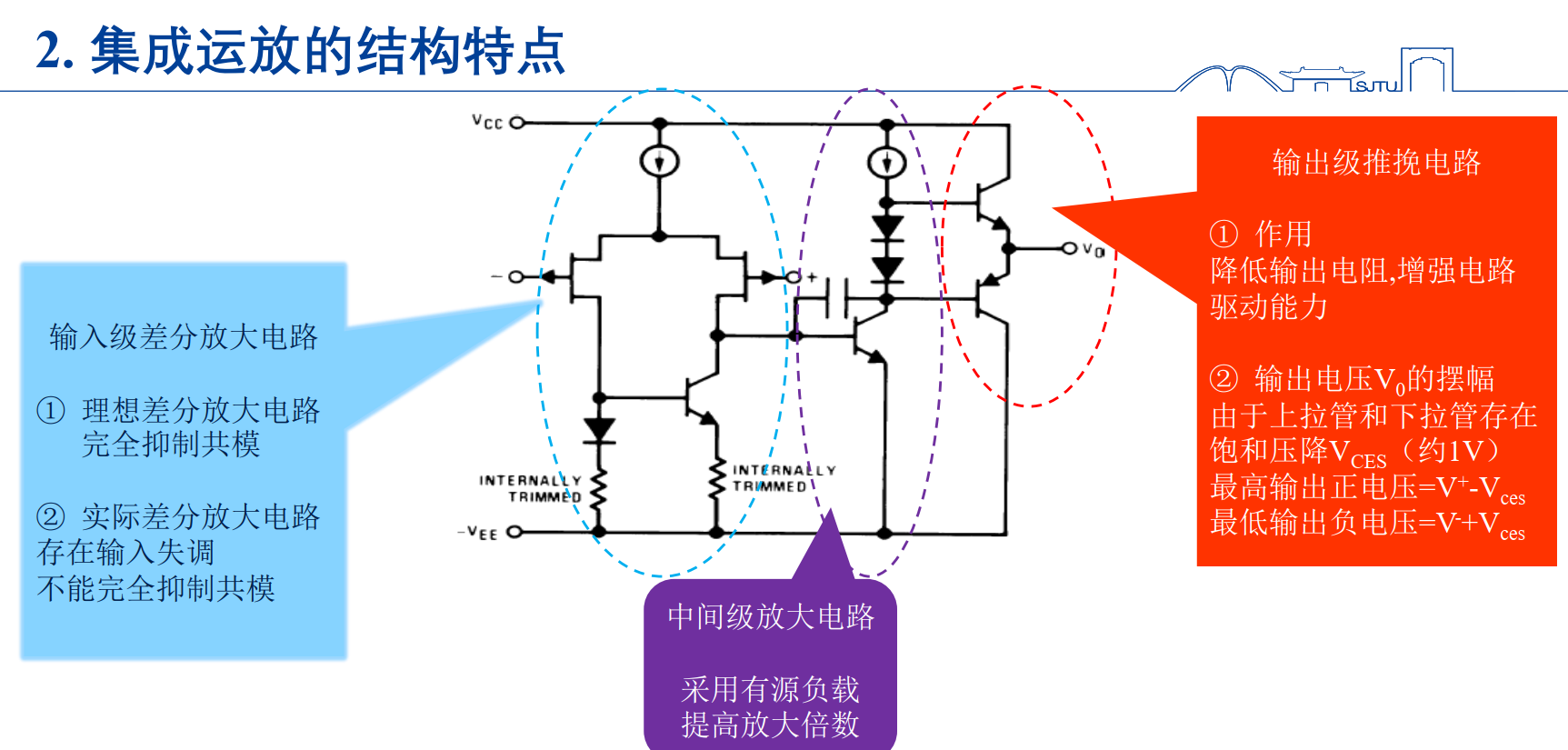
2 集成运放的结构特点
输入级差分放大电路:
- 理想差分放大电路完全抑制共模
- 实际差分放大电路存在输入失调不能完全抑制共模
中间级放大电路
- 采用有源负载
- 提高放大倍数
输出级推挽电路
- 作用:降低输出电阻,增强电路驱动能力
- 输出电压V0的摆幅由于上拉管和下拉管存在饱和压降VCES(约1V)最高输出正电压=V+-Vces 最低输出负电压=V-+Vces
3 集成运算放大器的主要技术参数
通用集成运算放大器,主要性能指标参数平庸
- 输入失调电压: 1mv
- 单位增益带宽: 1Mhz
- 电压摆率: 1v/
- 输入电阻: 1-10M
功能集成运算放大器
- 某些指标参数相比通用集成运放有明显的提高。
- 如超低失调集成运放,高速运放,宽带运放等。
3.1 差分放大电路的瑕疵—输入失调
抑制共模,电路对称很重要!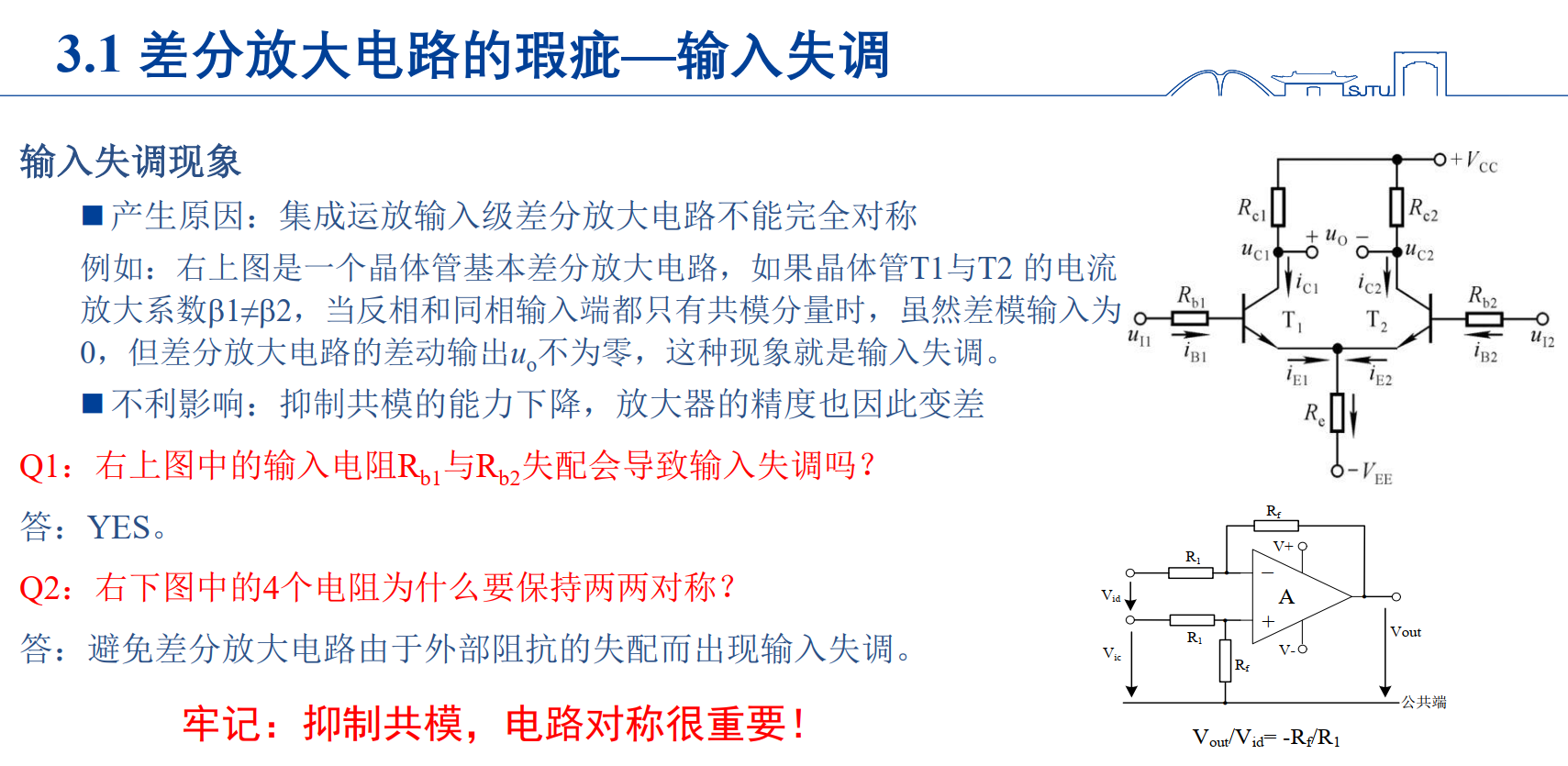
输入失调指标及相关的功能型集成运放
输入失调指标:
- 输入失调电压Input Offset Voltage
在集成运放的两个输入端之间加上一个直流偏置电压,通过调整这个电压使得运放的输出为零,这个直流偏置电压就被称为输入失调电压,该电压的大小反应了输入级差分电路的不对称程度。 - 输入失调电流Input offset current
输入信号为零时,放大器两个输入端平均偏置电流之差即为输入失调电流。 - 输入失调温漂
在规定的环境温度范围内,单位温度变化所引起的输入失调的变化量即为输入失调电压温漂
高性能集成运放:
- 零温漂型集成运放:具有极低失调电压漂移(<50 nV/°C)
- 高精度集成运放:具有低失调 (<50uV)
3.2 集成运算放大器的增益指标
- 差模电压增益—
在开环时输出直流电压增量与输入直流差模电压增量之比,通常以dB表示,理想情况 为无穷大,实际情况 为100~140 dB - 共模电压增益—
在开环且输入仅含共模电压时,输出电压增量 与输入直流共模电压增量 之比,通常以dB表示 ,理想情况 为0,实际情况大于0 - 共模抑制比—CMRR
放大器的差模电压增益与共模电压增益 之比,一般用dB来表示。
CMRR =;由于实际运放由于存在输入失调,CMRR不可能无穷大,一般直流CMRR在80dB-140dB
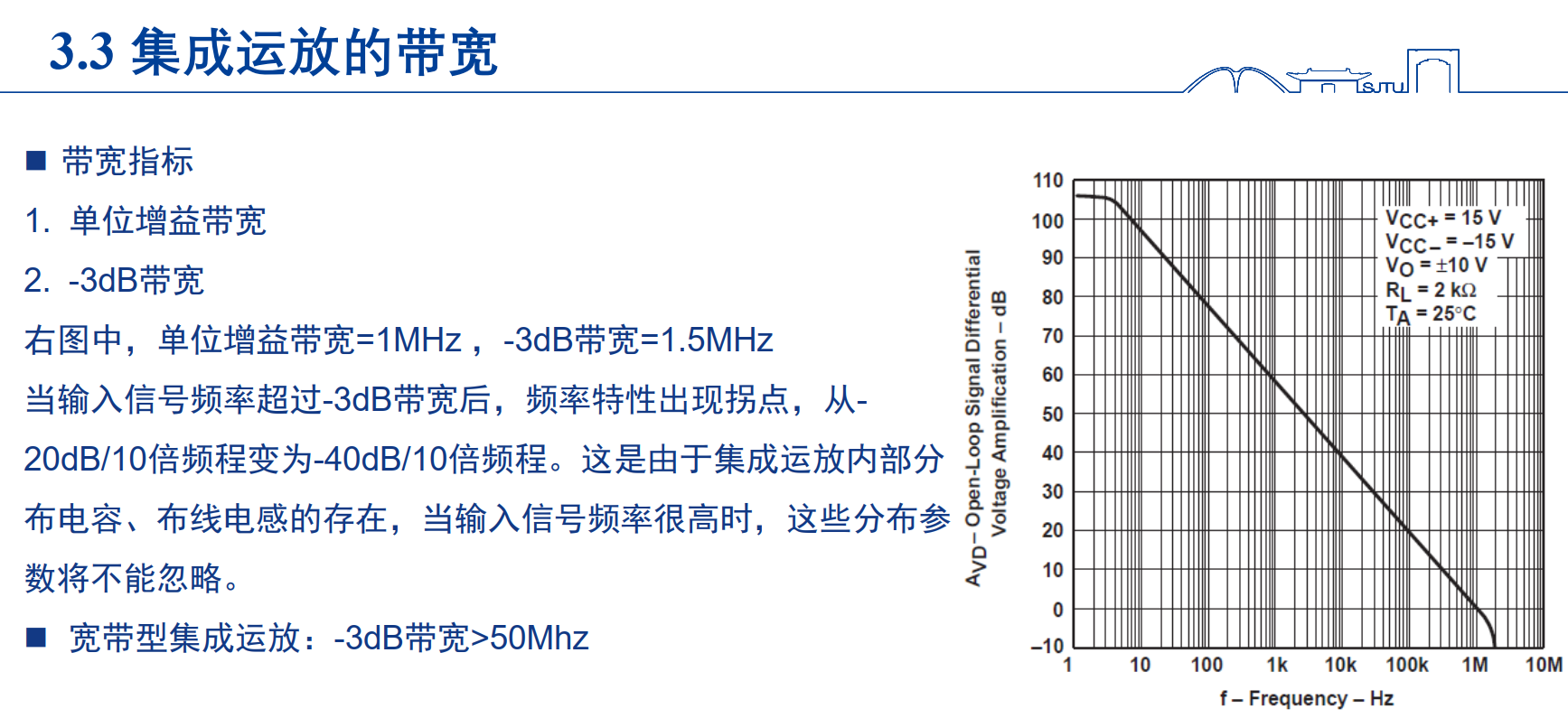
3.3 集成运放的带宽
宽带型集成运放: -3dB带宽>50Mh
3.4 输出电压摆率(Slew Rate)
- 运算放大器在额定负载条件下,输入一个大幅度的阶跃信号时,输出电压的最大变化速率。该指标以阶跃响应的上升速率来反映放大电路响应快速变化信号的能力。
- 例如OP07的电压摆率为0.3V/μs,而OPA637的SR=135 V/μs ,明显比OP07快。
- 在实际工作中,输入信号的变化率一般不要大于集成运放的 SR 值,否则输出电压会因集成运放来不及响应而产生畸变。
- 高速运放有较高的SR,用于大脉冲信号延时小;
- 宽带运放用于高频小信号的放大。
3.5 集成运放的输入输出摆幅
电压摆幅内缩的根本原因:在线性电路中,上拉管和下拉管的管压降Vce常常要大于1.5V,不可能达到数字电路饱和导通时的压降水平(0.1V)
轨对轨集成运放:① 输入轨对轨② 输出轨对轨③ 输入输出轨对轨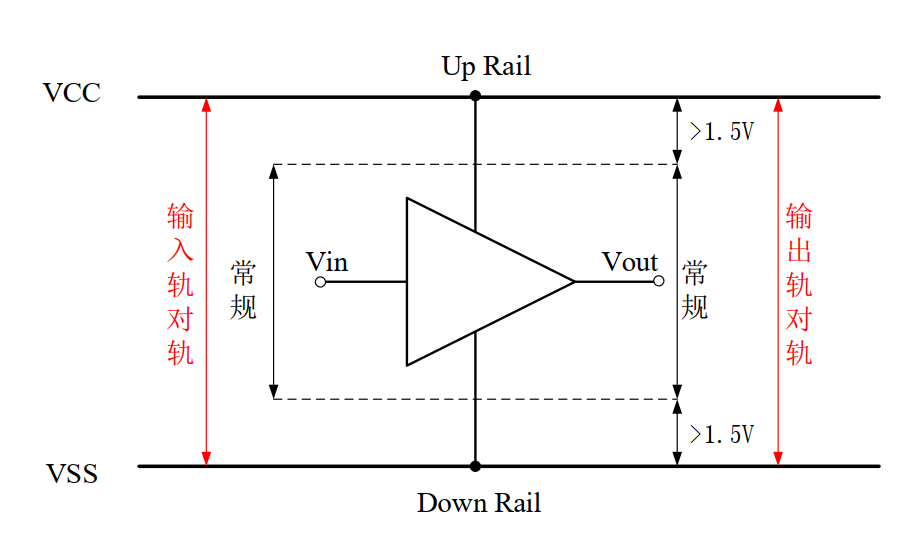
3.6 输出电流的特性
输出电流的大小-mA级。除非特别申明具有大电流输出特性,一般运放的输出电流的极限在10-20mA,但长期工作的输出电流则在几个mA。大电流集成运放:输出电流可达50mA-100mA
集成运放的输出电流的流向
灌电流(sink current):电流由集成运放由外部电路流入输出管脚
拉电流(source current):电流由集成运放通过输出管脚流向外部电路
3.7 高精度通用集成运放
不作考核
3.8 电源抑制比PSRR
如果直流电源电压发生变化, 理想运算放大器的输出不应因此而变化,但实际集成运算放大电路的输出通常会发生变化。
PSRR:如果电源电压变化
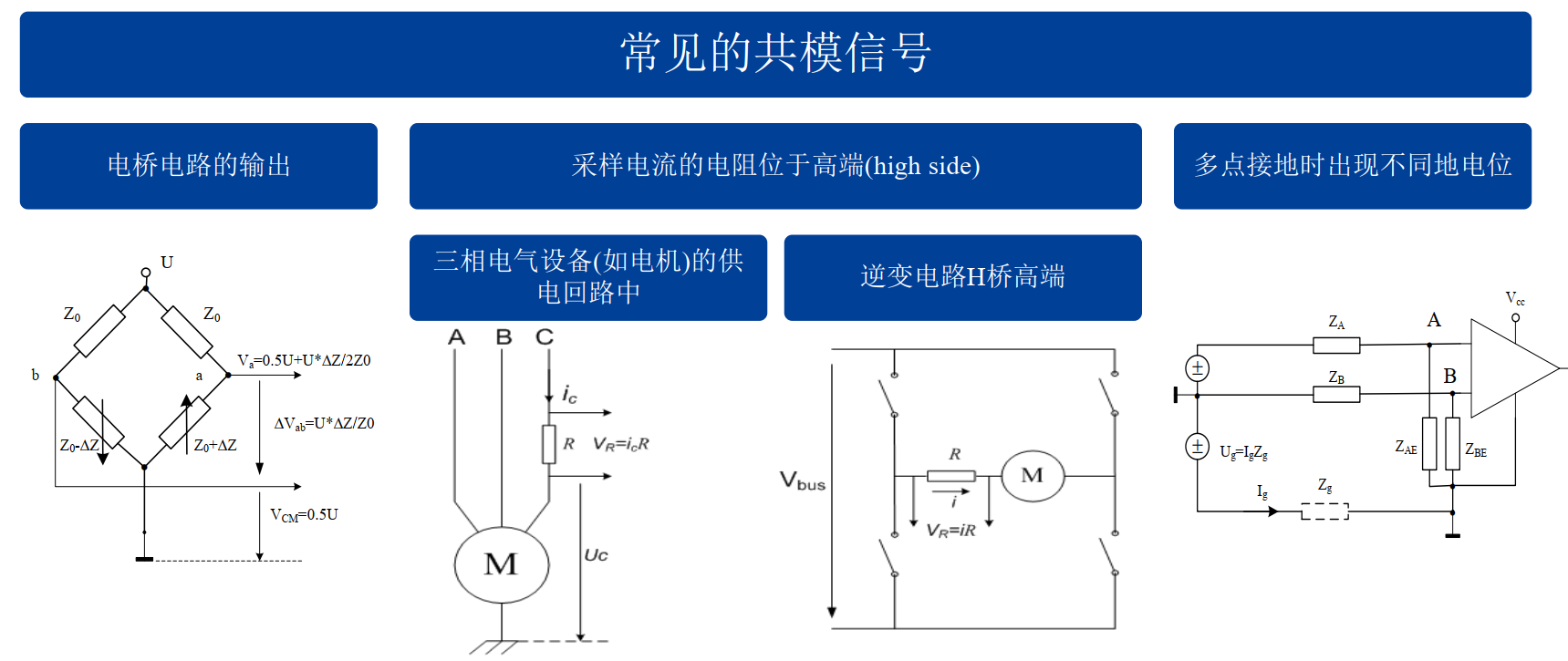
4. 共模信号与共模抑制
常见的共模信号来源:电桥、多点接地、高位采样
高共模的危害-阻塞
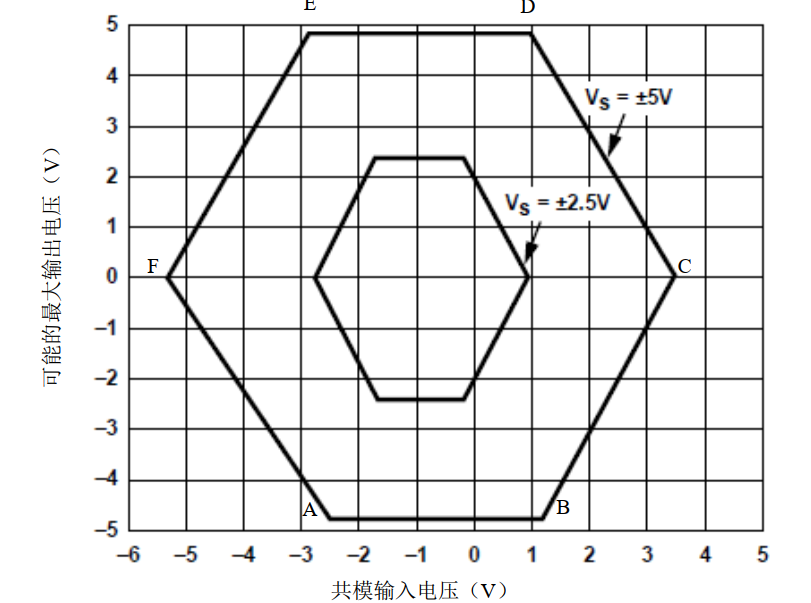
共模六边形上点F和C点就是所对应的横坐标就是共模阻塞电压。此时,差模输入无论多大,都不会在输出中得到反映。因为此时输入级晶体管已经处于饱和导通或截止状态。共模分量应该限制在 AB、ED 范围内。
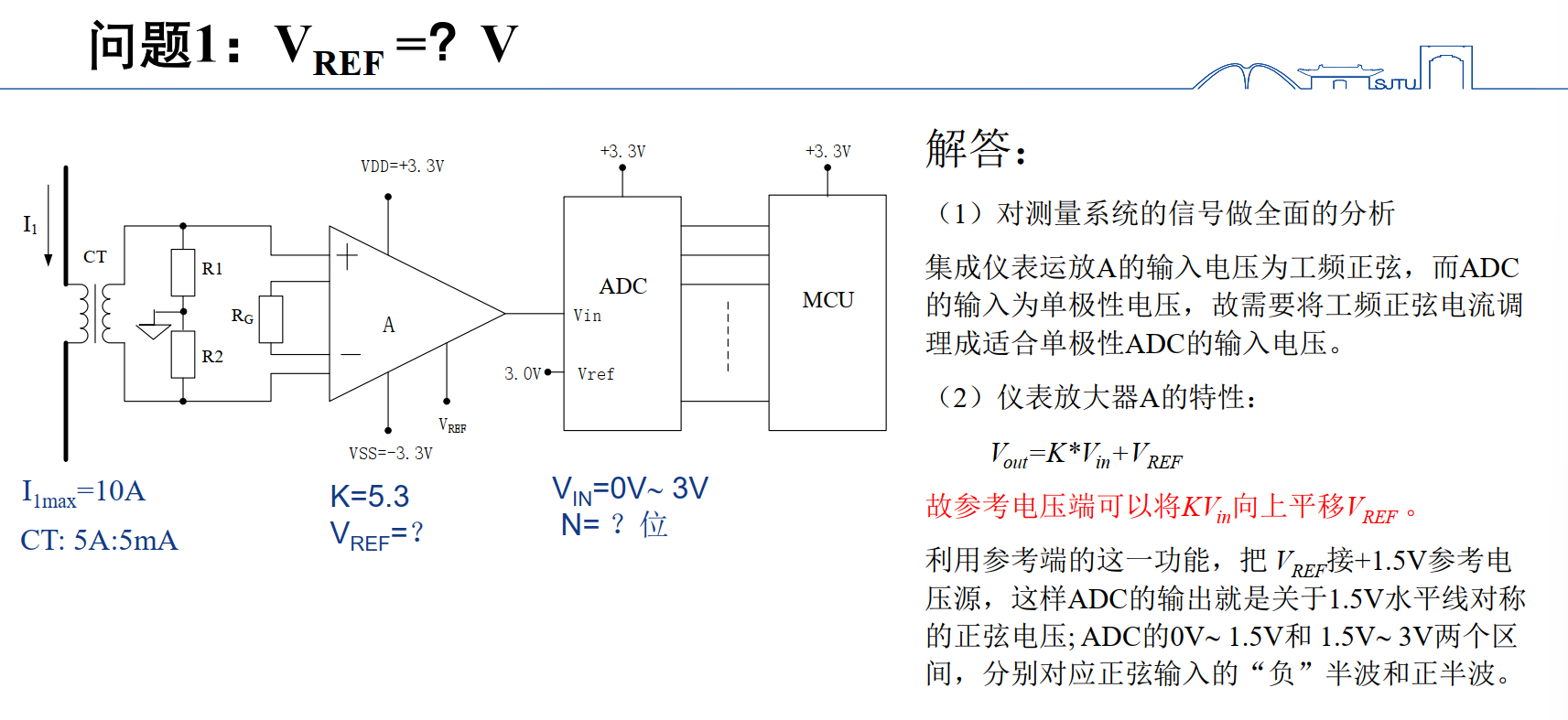
集成仪表放大器的核心——三运放构成的的仪表放大电路
RG为增益调节电阻,差分放大倍数为KV=(1+2R1/RG) *R3/R2 ,输出被向上平移了VREF, 方便交流电压的平移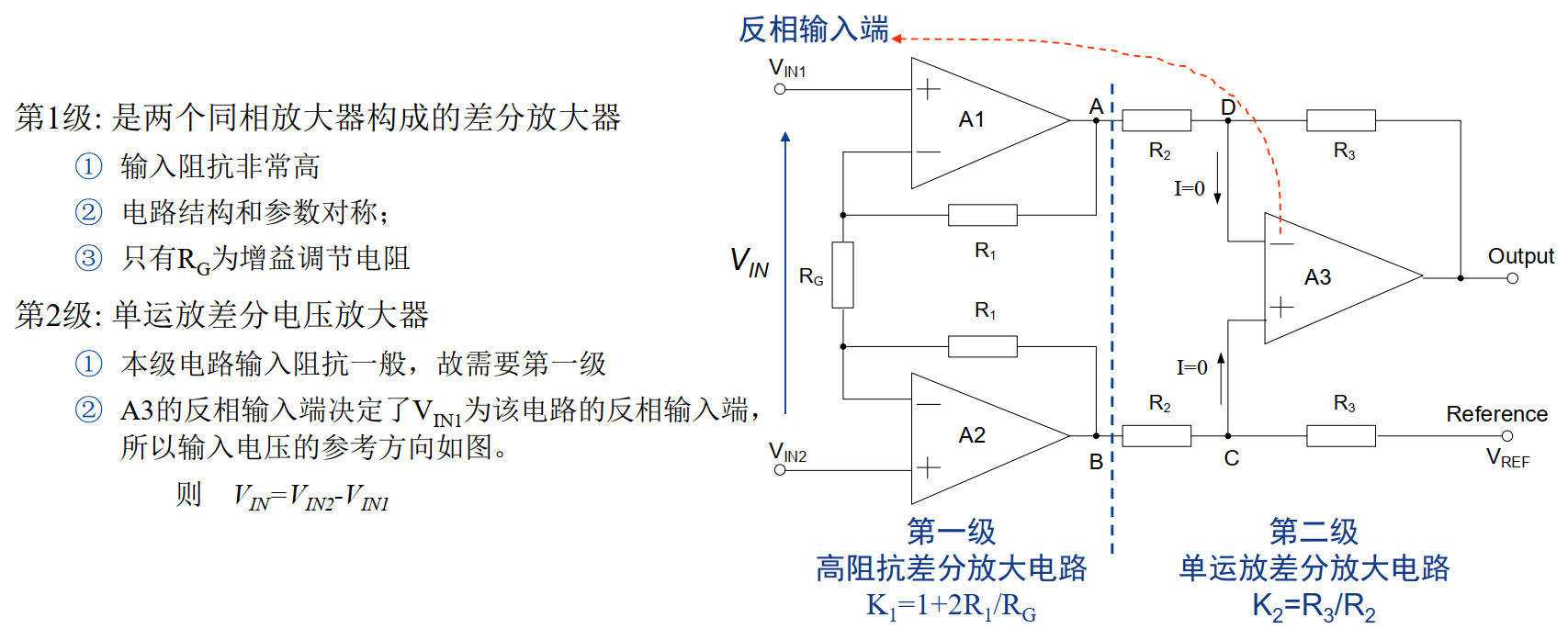
第五章 电气测量技术
互感器分类:电磁式互感器、电子式互感器
电磁式互感器
电磁式互感器是一种测量用途的变压器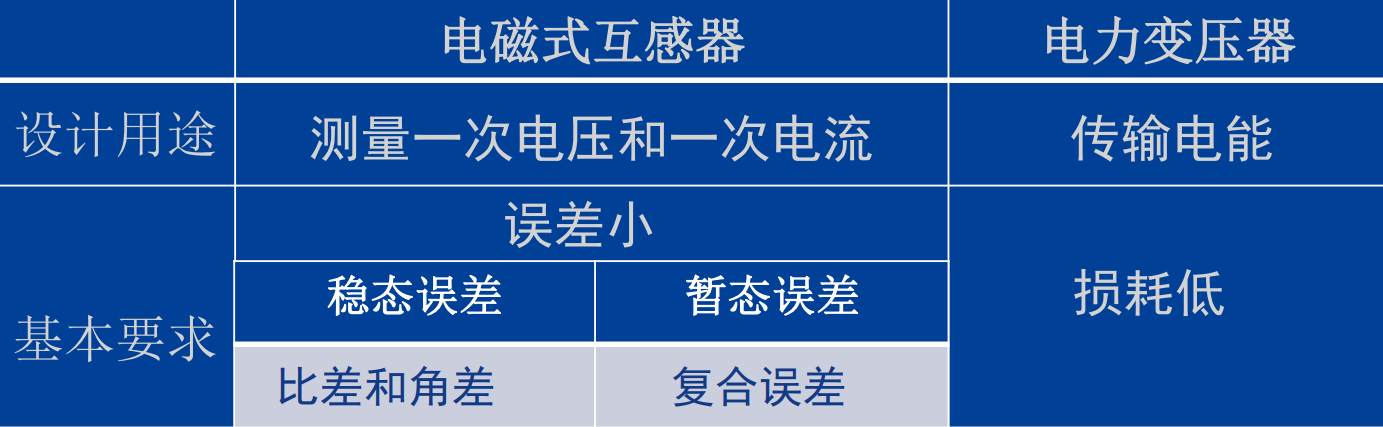
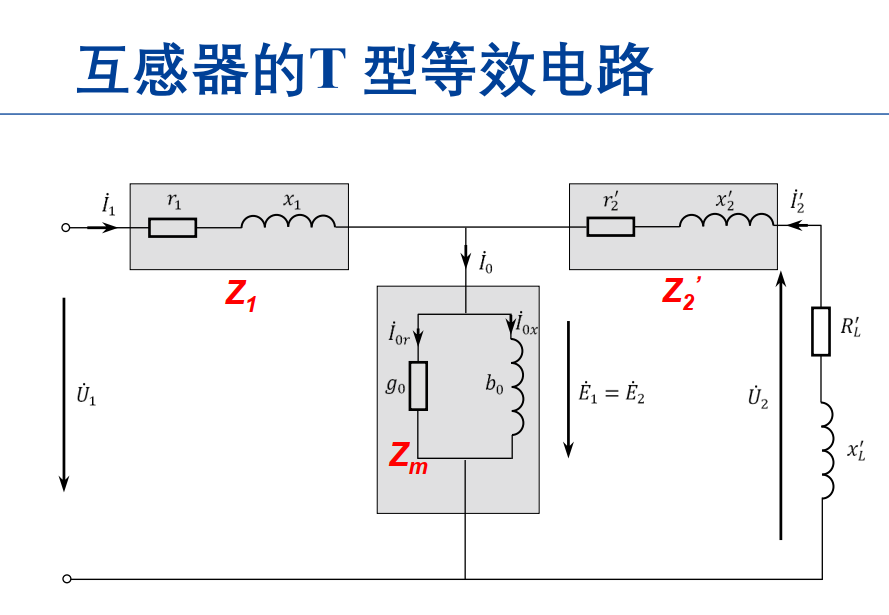
Q1:为什么会出现电压比差? A1: 由于𝑍1和𝑍2′不等于零
Q2:为什么会出现电流比差?A2:由于I0不等于0或Zm不是无穷大
Q3:短路暂态过程时若CT饱和,电流误差会增大或畸变?A3:磁路进入饱和后xm变小,深度饱和时xm几乎为零,导致 i0出现尖脉冲的峰值, i2头部则塌陷
PT 过励磁影响:暂态电压升高
CT 过励磁影响:短路电流过大或偏移
直流分量导致励磁电流和二次电流畸变
电磁式CT二次侧不允许开路:二次侧开路,二次电流产生的去磁磁通消失,一次电流全部变成励磁电流,铁芯容易周期性进入深度饱和,磁通量波形近似平顶方波,在磁通量过零时二次侧将产生数千伏高压,对人身和设备造成危害。将在铁芯中产生较大剩磁,使互感器比差和角差增大
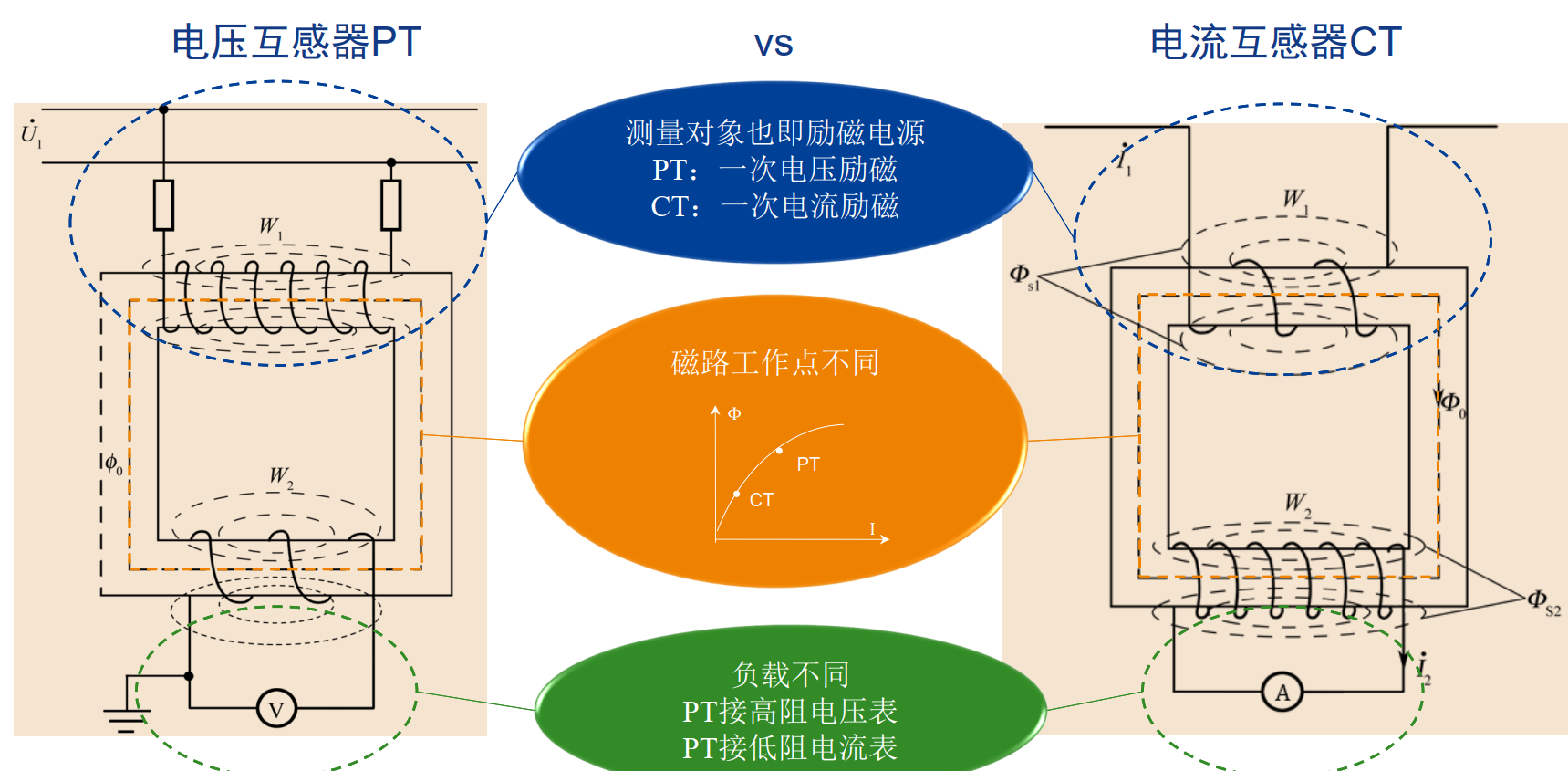
电子式互感器
分类:
低功率电流互感器LPCT
采用导磁性能更好的超微晶合金作为铁芯材料,与硅钢片相比,超微晶合金的相对磁导率提高了10倍以上,意味着励磁电抗增大10倍。LPCT消耗功率极低。LPCT是抗饱和性能介于电磁式电流互感器和罗氏线圈之间的一种电子式电流互感器。
罗氏线圈(Rogowski线圈)
输出电压正比于输入电流一阶导,引入积分环节才能得到一次电流
有点:
- 线性度好:无磁饱和,在量程范围内,输入输出是线性关系,容易标定
- 测量范围大:测量交流电流量程从几安到几百千安,但小电流准确度下降
- 响应速度快,频响范围宽,适用频率可从低频到1MHz
- 一次侧和二次侧电流无相角差
- 互感器二次开路不会产生高电压,无二次开路危险
光学电流传感器OCT
无源型电子传感器,其高压部分均为光学器件而不采用任何有源器件。
基本原理是利用法拉第磁光效应:一束线偏振光通过置于磁场中的磁光材料时,线偏振光的偏振面会随着平行于光线方向的磁场的大小发生旋转。
电容式互感器CVT
优点:
- 避免电磁式PT与电网容抗的铁磁谐振
- 可兼顾电压互感器和电力线路载波耦合电容器两种设备的功能
- 能可靠阻尼CVT内部铁磁谐振
- 具备优良的瞬变响应特性
光学电压传感器OVT
机理是晶体的Pockels效应。Pockels效应是指晶体在电场作用下,透过晶体的光发生双折射,这一双折射快慢轴之间的相位差与被测电压呈正比关系,将Pockels元件直接连接到被测电压的两端,经光电变换及相应的信号处理便可求得被测电压。
电子式互感器的优点:
- 体积小、重量轻,方便安装于成套电器设备中,
- 减少变电站所占地面积
- 有助于提高电力系统自动化、数字化的发展水平
- 功耗低
指针式电工仪表
分类:磁电系仪表、电磁系仪表、电动系仪表、功率表
磁电系仪表
工作原理:指针偏转的角度与流经线圈的电流成正比
用途
- 测量直流电流
- 测量直流电压
优点 - 刻度均匀;
- 灵敏度和准确度高;
- 阻尼强;
- 消耗电能量小;
- 受外界磁场影响小。
缺点 - 只能测量直流;
- 价格较高;
- 不能承受较大过载。
电磁式仪表
工作原理:被测电流流过固定线圈时,产生的磁场使固定铁片和可动铁片同极性磁化,磁场相互排斥使可动部分转动。带动指针旋转
优点:结构简单、价格低、能进行交、直流测量。
缺点:刻度不均匀、准确度较差
电动系功率表
原理:可动线圈的偏转角正比于负载功率P
功率表接线应遵守“电源端”守则将电源端“*”接在电源的同一极性上。
第六章 数字化电气测量系统设计
1. A/D 转换器基础
A/D转换器: 对连续的模拟量进行采样、量化、编码的器件
采样:把输入连续变化的模拟量离散化,变成时域上断续的模拟量。
量化:把时域上断续、 幅值连续的模拟量进行量化。
编码:把已经量化的数字量用一定的代码表示输出。
模数转化器的基本组成: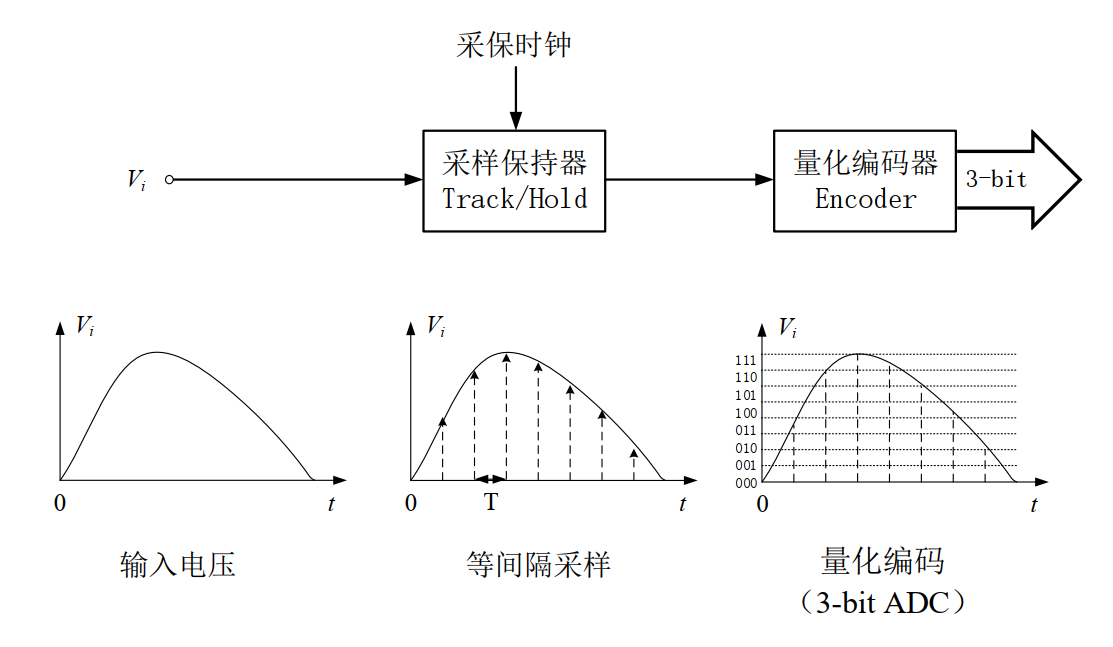
采样保持器主要指标:采样频率
量化编码器主要指标:位数
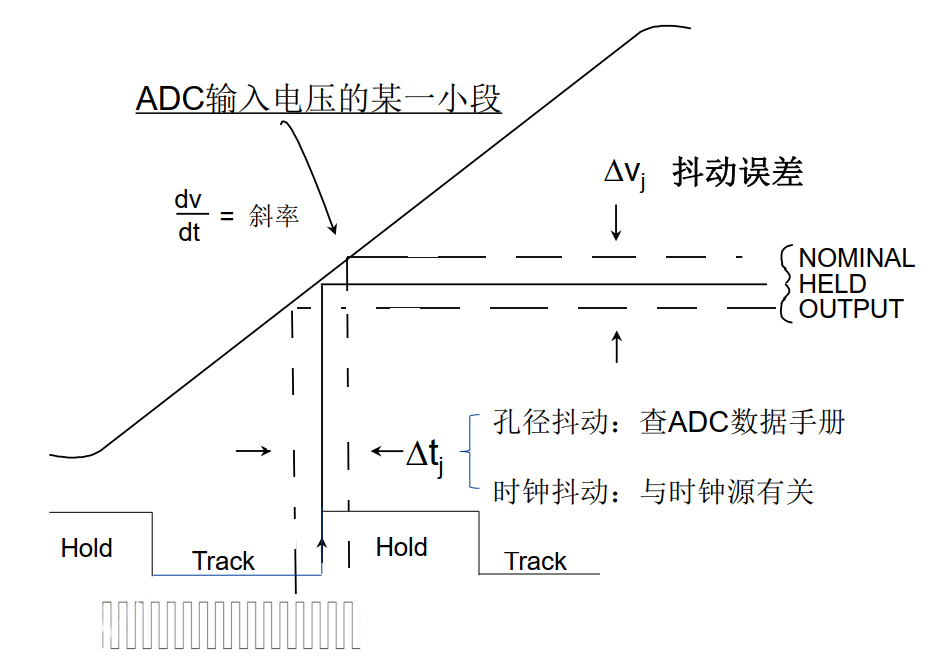
采样保持器中的两种抖动:孔径抖动
抖动误差
抖动时间
抖动误差
抖动误差会降低ADC器件在高速采样时的ENOB(有效转化位数)
ADC的静态特性与量化误差
- 静态特性:阶梯曲线
- 量化误差e:静态特性与与拟合直线之间锯齿状的误差
- 量化噪声的特点:锯齿波,谐波丰富
- 量化噪声RMS值= LSB/
量化噪声最大值= LSB / 2
动态特性指标:SNR,SINAD,ENOB
信噪比 SNR (Signal-to-Noise Ratio without Distortion):指的是信号功率与噪声功率之比,常用dB数来表示
谐波失真 THD指的是信号功率与谐波功率之比,常用dB数来表示
信纳比 SINAD (Signal-to-Noise-and-Distortion Ratio):信号功率与所有其它频谱成分(包括谐波和噪声)的功率之比
备注:将SNR和THD的定义式代入上式就能证明等式成立
注意:
① 计算上述功率时都不考虑直流分量,且
② SINAD全面反映了ADC的动态性能。但厂家更爱使用SNR,实测得到的SNR也包含了所有的噪声成分,相当于SINAD
ADC的理想转换位数N与有效转换位数ENOB
理想SNR: 只考虑量化误差时,理想的SNR与ADC的转换位数之间满足
有效位数 ENOB:考虑其它误差(例如抖动误差)和谐波以后,ADC的实际位数
ENOB体现了一个ADC的实际转换精度,因为它是考虑了所有噪声和谐波计算得到的。实际使用该公式时,SINAD常常被
抖动误差对SNR的影响
对于幅值为1,频率为
抖动越小,信号频率越低,信噪比越高。
考虑ADC的量化噪声和抖动噪声,对应的总信噪比用下面公式计算:
据此SNR计算得到ENOB:
注意:以上计算的SNR还没有考虑THD及其它噪声例如器件的白噪声,所以还不能认为就是SINAD,但抖动噪声确实是其中最主要的噪声。
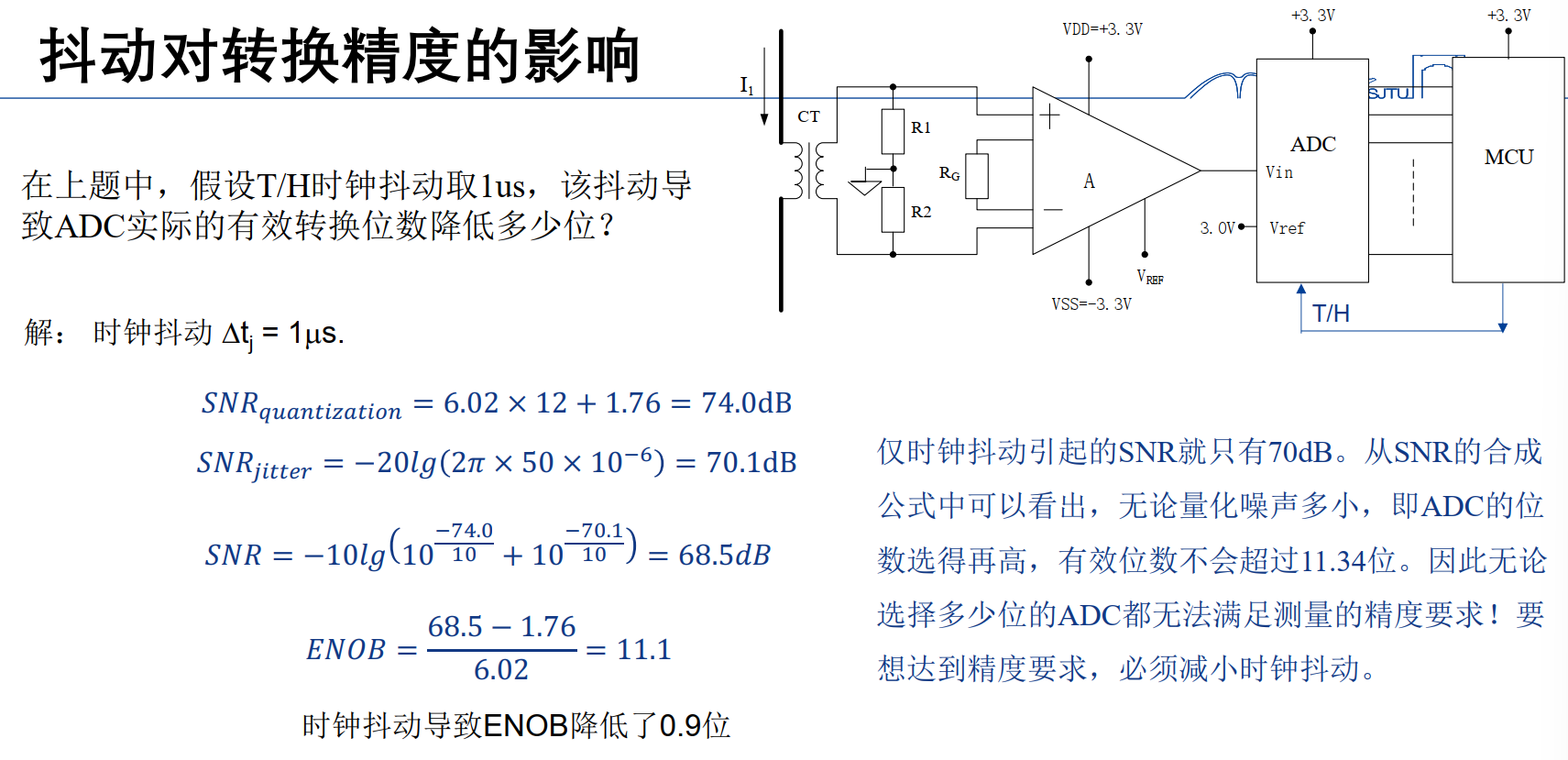
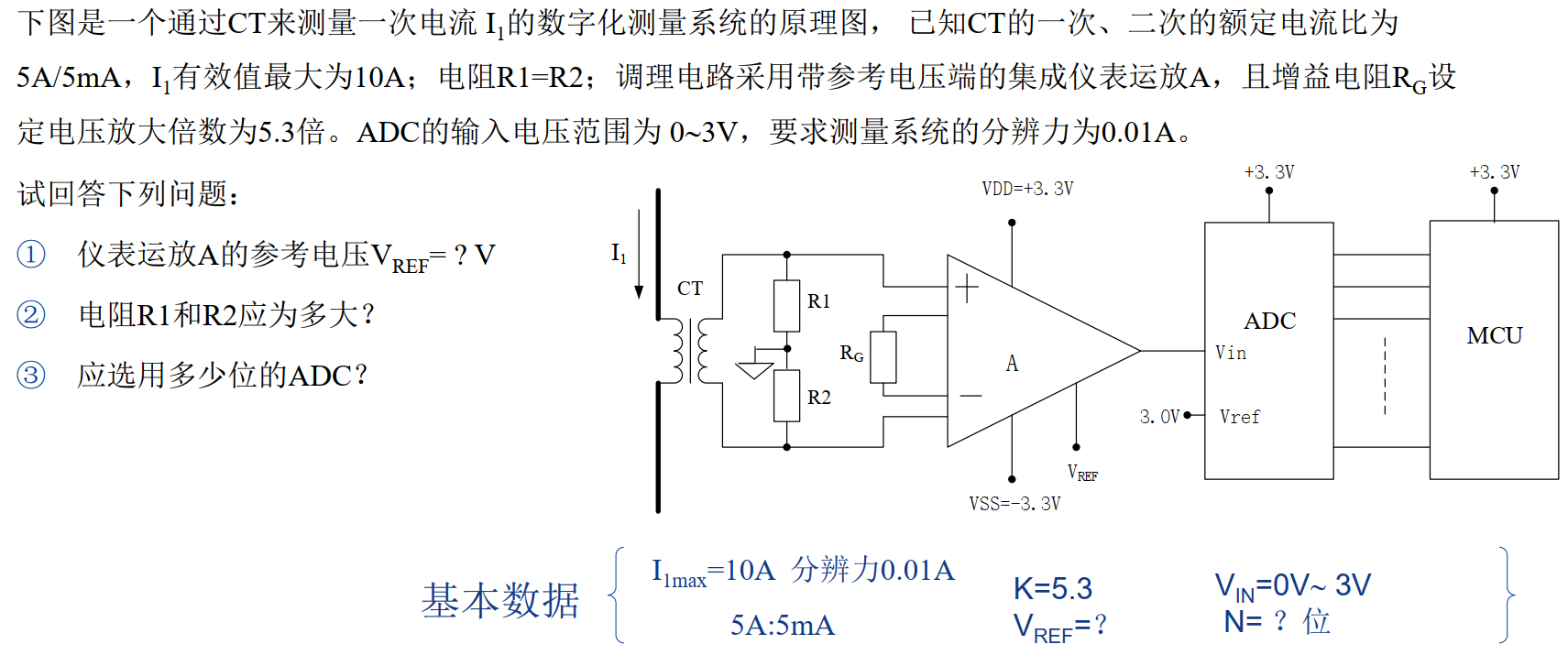
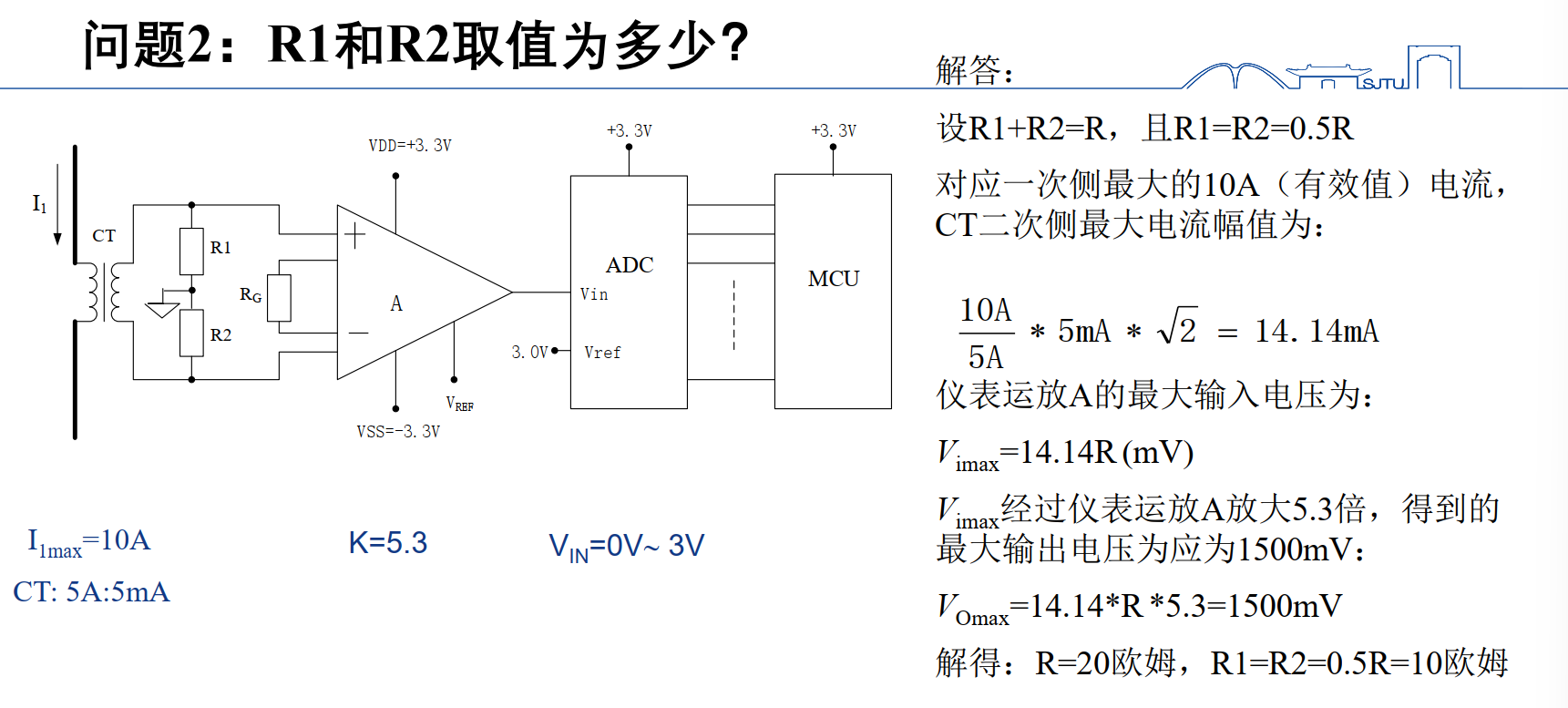
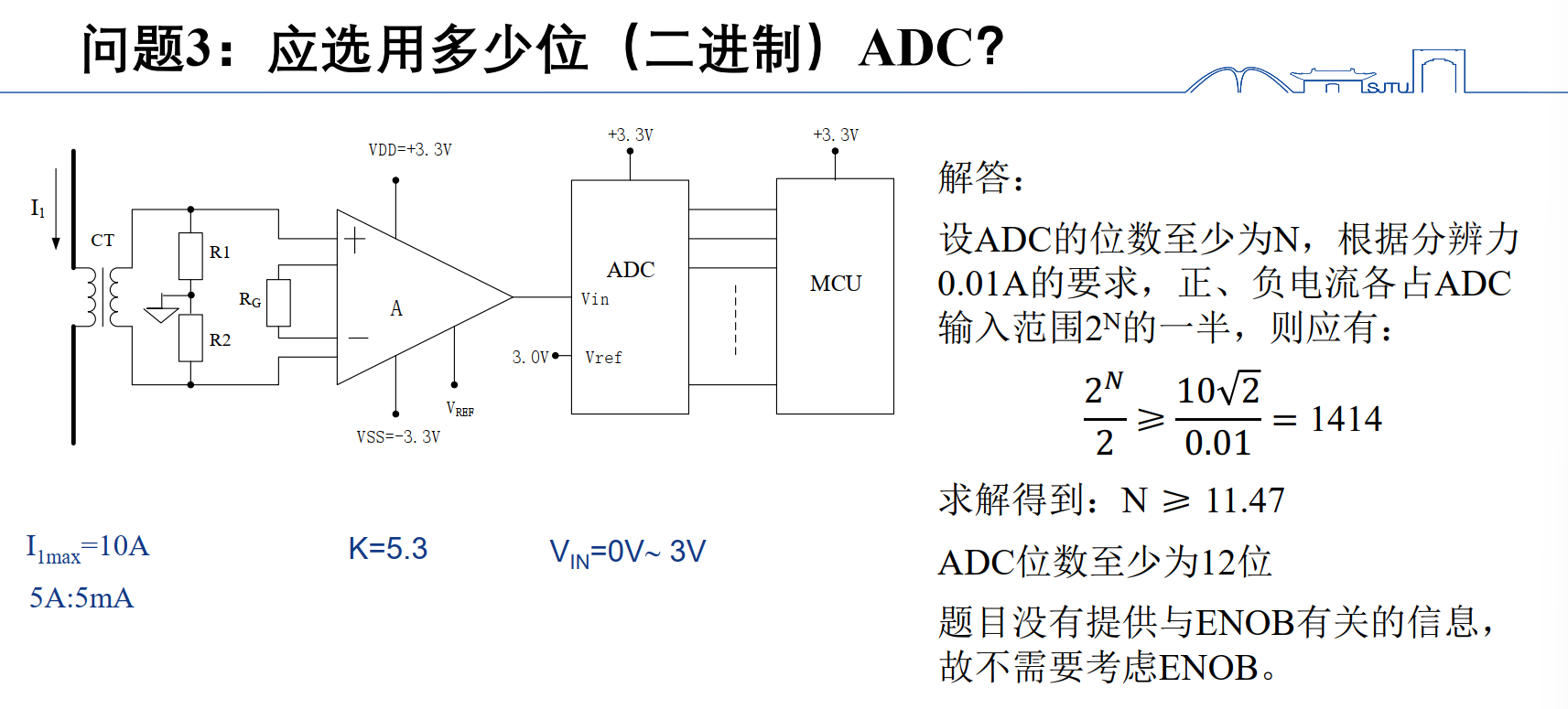
例题:数字化电气测量系统的基本计算
几类ADC的比较:
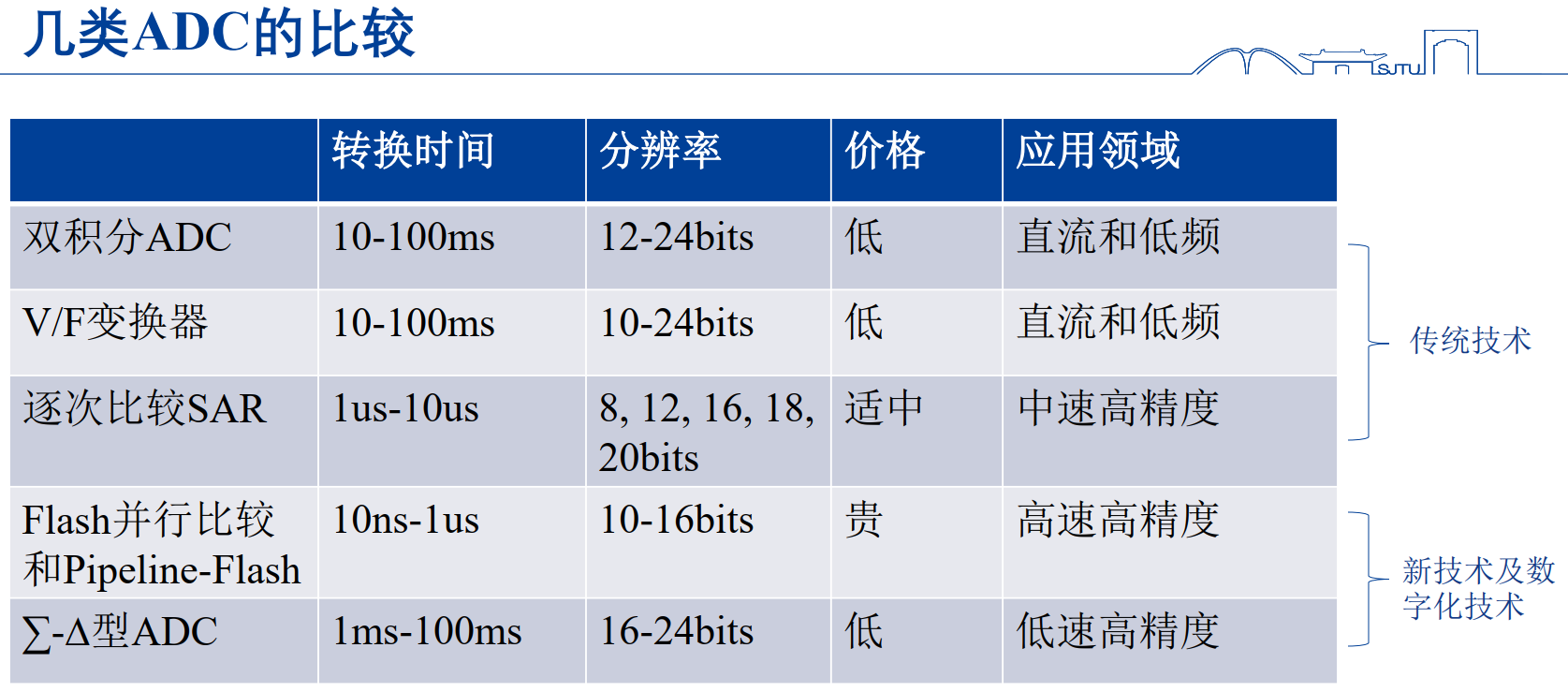
目前常见各种ADC所针对的应用:
➢ SAR ADC是A/D架构中应用最多、用途最广泛的ADC,它以100 kHz到1MHz的速度提供8-16位的分辨率。
➢
➢ Pipeline ADC是FlashADC技术的一种扩展,是当今高速ADC中最常用的架构,但由于多级,它们存在延迟或“流水线”延迟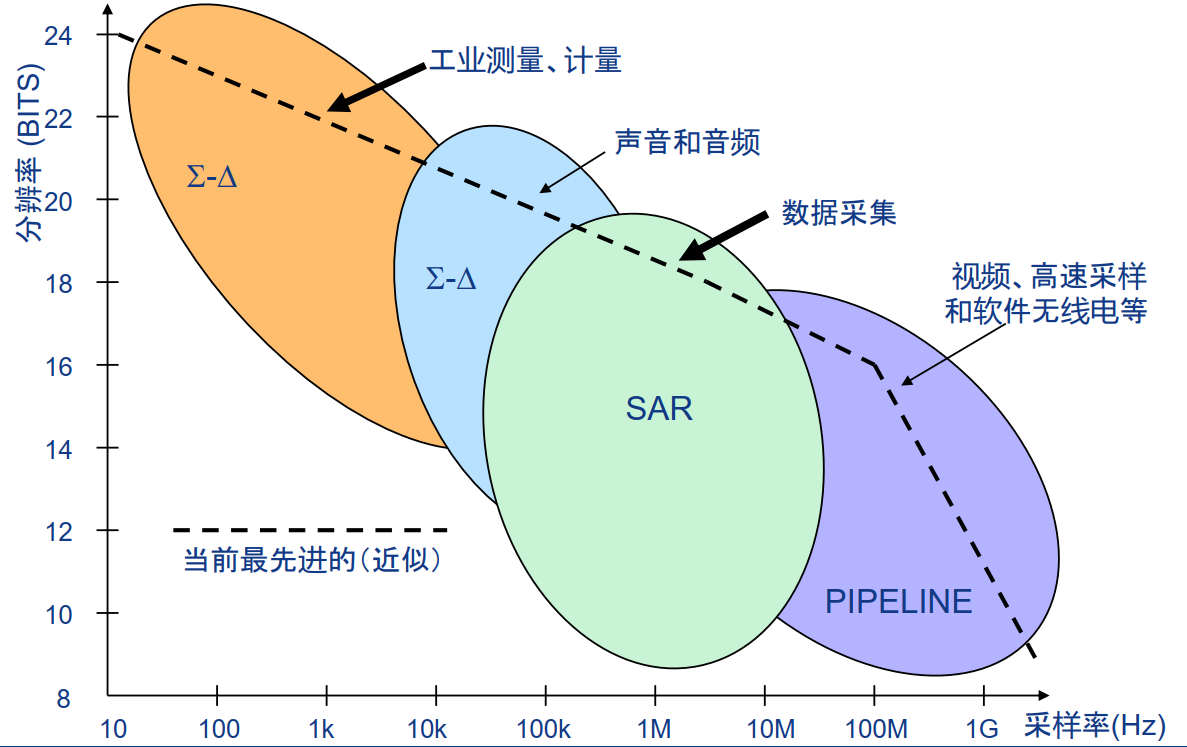
第七章 虚拟仪器简介
不做要求
第八章 电气测量中的抗干扰技术
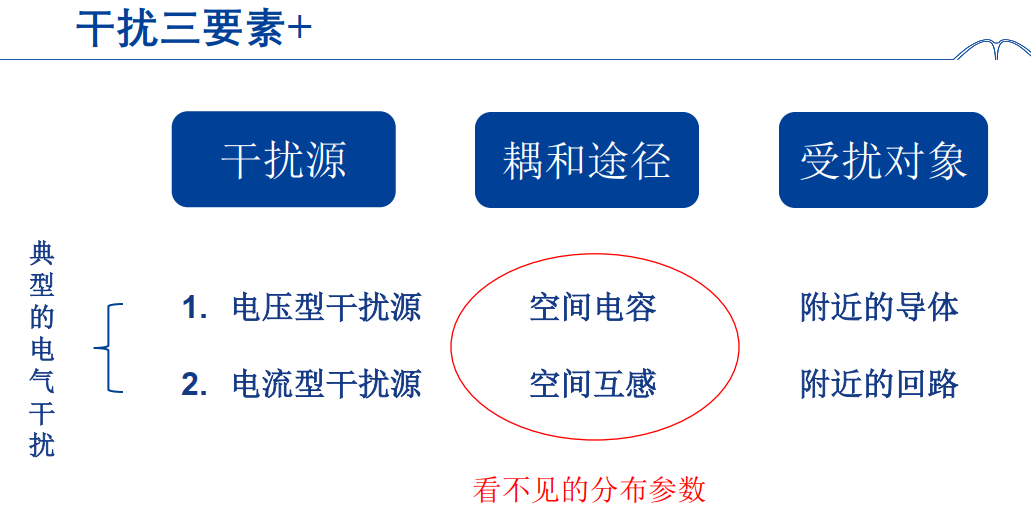
分布电容耦合模型:干扰源导体极板——介质——受扰导体。减小感应回路的面积S,是减小M 的最有效办法。 尽可能减小受扰电路的面积可以实现低互感回路。
1 电容耦合及其抗干扰对策
动点——电容耦合型干扰的主要干扰源之一。电路中某个节点对周围导体的电压呈现为周期性功率脉冲电压,其du/dt值很高,俗称“动点”
抗干扰对策:优化布局设计减小耦合电容、共模电流的滤波、用静电屏蔽层切断电容耦合
干扰源/受扰对象:减小有效极板面积
耦合途径:静电屏蔽
受扰对象:滤除共模电流
2 互感耦合及其抗干扰对策
- 干扰源——电流:① 脉冲功率电流 ② 大交流电流
- 耦和途径——空间互感
- 受扰对象——附近的回路
- 干扰性质——差模电动势e
结论:减小互感耦合M 的办法
① 减小受扰回路面积S
② 增加距离d
③ 减小µ ——磁屏蔽
对策:
- 干扰源:对折电流回路,减弱磁辐射,敏感的测量仪器/电路应置于磁场较弱的区域
- 耦合途径:磁屏蔽
- 受扰对象:增强其抗干扰能力
3 共阻抗耦合及抗干扰对策
- 共模电压:电压信号中共有的对地电压分量
- 共模电流:大小、方向相同的电流,与回路工作
共模电压的抑制
- 避免不必要的共模的产生,如前置放大电路避免多点接地
- 选用低失调运放, 对称的电路结构和参数
- 如外部阻抗无法保证对称,可用共模分量去驱动输入信号屏蔽层减轻共模的影响
共模电流的滤波——EMC滤波器